
Une pièce pour un café siouplé
sur
Un nouveau type de main robotique capable d’attraper sans problème n’importe quel objet a été développé par des chercheurs des universités de Cornell et de Chicago (États-Unis). La nouvelle main est paraît-il à même de ramasser des pièces et (de lancer) des œufs crus. Selon les développeurs les limites des applications de la nouvelle main robotisée sont celles de notre imagination.
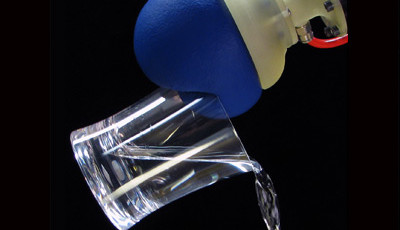
Cette main robotique est en fait un ballon rempli de café moulu. Le ballon est posé sur l’objet à attraper, puis tout l’air présent dans le ballon est aspiré pour créer le vide. Les grains de café sont alors tellement pressés les uns contre les autres qu’ils forment un solide. C’est donc exactement l’opération inverse de celle d’un paquet de café, dur sous vide, et qui devient mou quand on l’ouvre et que l'air y pénètre. On comprend immédiatement qu'une nouvelle main robotique de ce type est beaucoup plus simple à réaliser qu’une main robotique à doigts.
En principe, on peut utiliser toute substance constituée de petites graines ou de miettes, pourvu qu'elle soit susceptible de se solidifier sous vide dans un espace confiné. Les chercheurs ont par exemple expérimenté avec du riz, du couscous et du sable. Le sable est plus performant que le café moulu, mais trop lourd pour cette application.
Discussion (0 commentaire(s))