
Assemblage du kit rover M.A.R.S. de 4tronix
sur
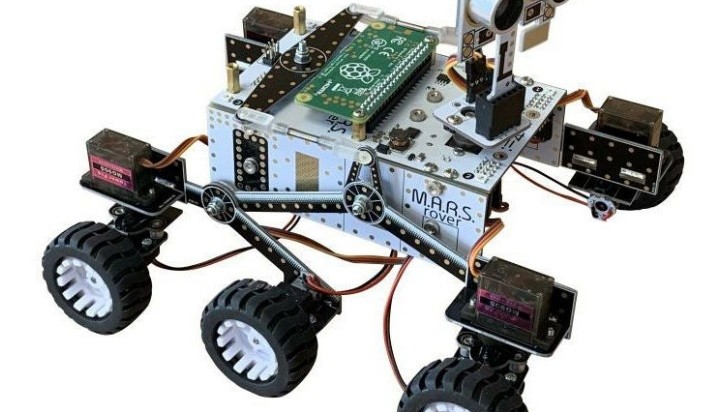
Inspiré par les rovers Curiosity et Perseverance de la NASA, le rover M.A.R.S. de 4tronix est un véhicule autonome conçu pour se déplacer sur terrain accidenté sur Terre plutôt que sur Mars. Bien entendu, dans ce cas M.A.R.S. ne fait pas référence à la planète, mais c’est un acronyme pour Mobile Autonomous Robotic System (Système Robotique Mobile Autonome). Jetons-y un coup d’œil.
Kit Rover M.A.R.S.
Le rover M.A.R.S. est livré sous forme d’un kit de pièces détachées, mais il ne nécessite aucune soudure. Le kit est complet, y compris les outils, j’ai cependant préféré utiliser mes propres tournevis à la place, car ils convenaient mieux. Il existe deux versions du kit : une basée sur le Raspberry Pi Zero et l'autre sur le BBC micro:bit. J’ai testé la version à base de Raspberry Pi. Notez que le Raspberry Pi Zero ou le BBC micro:bit ne sont pas inclus, pas plus que les quatre piles AA. Pour le Raspberry Pi, il vous faudra également une carte microSD.
Un clavier supplémentaire est disponible sur le site de 4tronix, mais je ne l’ai pas essayé. La version Raspberry Pi du rover permet de monter une caméra Raspberry Pi sur le mât du transducteur à ultrasons, mais je ne l’ai pas essayée non plus.
La boîte contenant le kit est étonnamment compacte (18 cm × 16 cm × 8 cm), mais elle est assez lourde (600 g) et remplie à ras bord de sachets en plastique contenant les pièces détachées. Il n’y a pas de manuel inclus. Des instructions détaillées pour l’assemblage et la programmation se trouvent sur le site Web de 4tronix. Il vous faudra donc un ordinateur avec une connexion Internet pour assembler le rover.
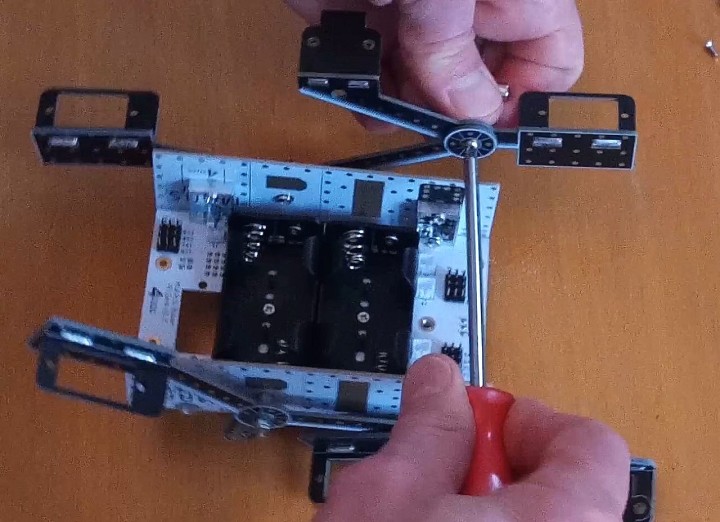
Les instructions d’assemblage sont assez claires et détaillées. L’assemblage du rover n’est pas difficile, mais il y a quelques parties délicates comme visser les supports de montage du moteur sans que les écrous ne tombent, fixer certains contre-écrous ou raccorder les moteurs. Faites cependant bien attention à l’orientation et au positionnement de certaines pièces comme les bogies et les servos, car il est facile de se tromper et de devoir recommencer. Cela m’est arrivé plusieurs fois.
Quelques conseils d’assemblage
L’assemblage du rover m’a pris deux heures environ à cause de quelques erreurs que j’ai faites.
Voici quelques conseils :
- Utilisez de vrais tournevis ;
- Il y a trois vis de 18 mm de long qui traversent les circuits imprimés. Veuillez bien les serrer avant de fixer la pièce de l’autre côté à l’aide d’un contre-écrou, car elles pourraient sinon se desserrer lorsque vous devrez ajuster l’écrou pour que les pièces qui y sont fixées puissent tourner librement ;
- Tous les connecteurs des servos sont orientés de la même manière. Ils sont repérés clairement, et les fils des servos ont un code de couleur. La masse (GND) en brun, le signal (SIG) en jaune. Il est pratique de noter par écrit le numéro de chaque servo (SVx) pour l’utilisation du programme servoTest ;
- Le mât du transducteur à ultrasons peut frotter sur les fils des servos si ces fils ne sont pas suffisamment rabattus vers le bas ;
- Après avoir raccordé les servos, vous pouvez enrouler leurs fils autour des corps des servos afin de mettre un peu d’ordre. En revanche, laissez libres les fils des moteurs des roues afin d’éviter qu’ils ne bloquent les mouvements des bras de suspension ;
- Il n’est pas nécessaire de couper les extrémités des bras de servos qui dépassent, cela permet uniquement d’obtenir une apparence plus propre.
Cerveau et puissance
Après avoir assemblé le rover, j’ai monté un Raspberry Pi Zero 2 W sur le dessus de celui-ci. J’ai utilisé une carte microSD comportant le système d’exploitation Raspberry Pi OS Buster installé. Je l’avais utilisé avec un autre projet, ce qui fait que le Raspberry Pi pouvait déjà se connecter à mon réseau Wi-Fi et que l’accès SSH était de même activé. Pour économiser les piles, j’ai alimenté le Raspberry Pi via USB pour le téléchargement et l’installation du logiciel permettant de faire fonctionner le rover. De nouveau, les instructions sur la manière de procéder sont claires et détaillées, mais elles ne sont disponibles qu’en ligne.
J’ai aussi essayé un Raspberry Pi Zero à la place d’un Zero 2 W et je me suis aperçu qu’il fonctionnait aussi bien. L’avantage d’utiliser un Zero 2 W est, bien entendu, qu’il démarre bien plus rapidement.
Le Raspberry Pi n’alimente pas le reste du rover, il vous faut des piles pour cela. Si donc, en essayant les exemples, vous voyez un message d’erreur concernant le bus I²C, et que vous êtes certain de l’avoir activé sur le Raspberry Pi, vérifiez le commutateur On/Off et vos piles. Une LED bleue indique si le rover est alimenté ou pas.
J’ai mesuré une consommation de l’ordre de 400 à 500 mA lorsque le rover se déplace avec le script motorTest. Elle est de l’ordre de 200 mA au repos.
Programmer le Rover
Lors du développement de vos propres programmes pour le rover, il est probablement préférable de le faire autant que possible avec le Raspberry Pi alimenté par USB afin d’économiser les piles, et de n’alimenter le rover que pour faire les tests.
J’ai essayé tous les exemples fournis par 4tronix et j’ai trouvé que tout fonctionnait sans aucun problème. J’ai n’ai pas fait du tout de programmation moi-même. Notez que pour une raison quelconque, l’utilisation des LED RVB du rover nécessite des privilèges d’administrateur, tout script les utilisant doit donc être exécuté avec sudo.
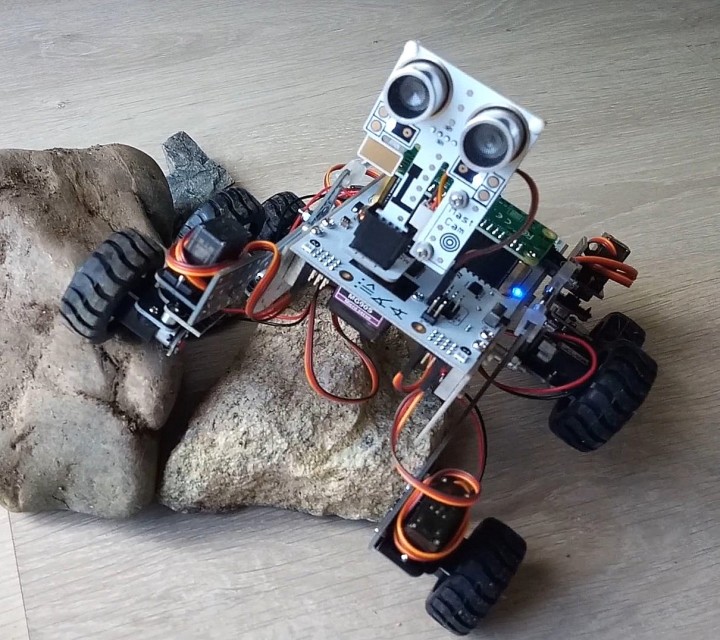
Faire rouler le rover par-dessus les obstacles est assez impressionnant. Il n’avance pas très vite, mais les bras de suspension lui permettent de franchir les obstacles comme s’ils n’existaient pas.
Un Rover de bonne qualité
Le kit de rover M.A.R.S. de 4tronix et un kit de haute qualité qui, une fois assemblé, a une allure assez sympa grâce à ses impressions décoratives et ses éléments en circuits imprimés. Il mesure 20 cm × 18 cm × 16 cm, il est donc un peu plus gros que la boîte dans laquelle il est livré. L’assemblage du robot est assez facile, car tout s’adapte parfaitement (ce qui est assez rare) et les instructions sont claires et détaillées. Son utilisation est facile aussi, et les exemples et les programmes de test s’installent et fonctionnent sans aucun problème.
Une fois assemblé et le logiciel installé, le rover est prêt à se déplacer et pratiquement rien ne peut l’arrêter. Certaines connaissances en programmation sont bien entendu nécessaires, mais c’est bien pour ça que vous en êtes procuré, n’est-ce pas ?
Étendre le Kit
Le circuit imprimé principal possède quatre trous de fixation supplémentaires qui peuvent être utilisés pour fixer des extensions, et il y a de nombreuses connexions disponibles pour ajouter davantage de servos. (À propos, il y avait un servo supplémentaire dans le sachet de pièces détachées de mon kit).
Je n’ai pas trouvé de schéma, je ne sais donc pas si les connecteurs des servos peuvent être utilisés pour autre chose. Il y a aussi deux connecteurs d’extension I²C disponibles auxquels vous pourrez raccorder des capteurs, par exemple.
Traduction: Jean-Luc Coulon
Discussion (0 commentaire(s))