
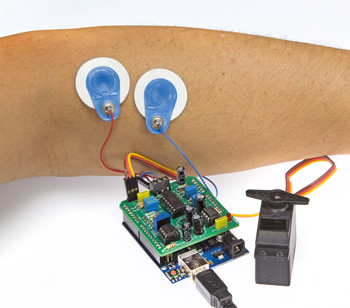
commande « musclée » de servomoteurs
Arduino interprète les signaux EMG
Continuez la lecture de cet article avec un abonnement Elektor.
Rejoignez des dizaines de milliers d’ingénieurs et de passionnés d’électronique dans le monde entier en devenant
membre. Profitez de l’accès au magazine Elektor, aux archives Elektor, de remises exclusives,
d’informations en avant-première sur les produits Academy Pro, et bien plus encore. Choisissez un abonnement
dès aujourd’hui et commencez à explorer tout ce qu’Elektor a à offrir. Connectez-vous ici si vous êtes déjà membre.

PRINT (Gold)
- 8 x magazine imprimé
- 8 x magazine numérique
- Accès aux archives d'Elektor *
- Accès à 5000+ fichiers Gerber
- 10 % de remise dans l'e-choppe *
plus 20 EUR de frais de livraison (France, Suisse, Belgique), autres pays : 25 EUR
* Réduction dans la boutique Elektor et accès illimité aux archives en ligne pour les membres titulaires GOLD ou GREEN uniquement. Les membres avec abonnement d'essai ont un accès limité aux archives.

DIGITAL (Green)
- 8 x magazine imprimé
- 8 x magazine numérique
- Accès aux archives d'Elektor *
- Accès à 5000+ fichiers Gerber
- 10 % de remise dans l'e-choppe *
* Réduction dans la boutique Elektor et accès illimité aux archives en ligne pour les membres titulaires GOLD ou GREEN uniquement. Les membres avec abonnement d'essai ont un accès limité aux archives.

Discussion (1 commentaire(s))