
démarrage en douceur pour amplificateur
sur
Vous allumez une lampe ou un appareil quelconque et à ce moment précis... pan ! Le fusible saute.
Souvent c'est parce que l’appel de courant dépasse les capacités du fusible sans que l'appareil impliqué ne présente le moindre défaut. Cette irruption de courant de forte intensité peut se produire aussi bien dans les circuits avec un transformateur d’alimentation qu'avec une alimentation à découpage sans transformateur d’entrée ; mais la cause n'est pas dans la même dans les deux cas.
Avec un transformateur, la surintensité est due à la saturation du noyau ; dans les alimentations à découpage, c’est le courant de charge des condensateurs qui en est la cause.
Cette surintensité est très élevée, et certains composants n’apprécient pas… Ce n’est donc pas une surprise que ce soit lors de l’enclenchement que les appareils et/ou leur alimentation flanchent. C’était aussi le cas des lampes à incandescence, désormais interdites.
Les fabricants d’appareils électriques et électroniques – et sans nul doute les lecteurs d’Elektor – connaissent bien ce phénomène, et y remédient : il faut, d’une manière ou d’une autre, limiter l’appel de courant à la fermeture.
Mise sous tension d’un transformateur d’alimentation
On cherche toujours à maximiser le flux du champ magnétique dans le noyau en fer et à réduire la taille de l’entrefer afin de minimiser les pertes, mais cela entraîne une augmentation de la surintensité transitoire à l’enclenchement. Contrairement à ce que l’on pense généralement, c’est lorsque la tension est nulle au moment de la fermeture du circuit que la surintensité est la plus forte.
Quelques formules suffisent pour illustrer le phénomène. En régime établi, après disparition des transitoires, le déphasage entre la tension du secteur et le flux du champ magnétique est de 90° :
![]()
 Cette équation est une application de la loi de Faraday. Il s’en suit :
Cette équation est une application de la loi de Faraday. Il s’en suit :

C’est donc bien au passage par zéro de la tension que le flux du champ magnétique atteint son maximum en valeur absolue.
En régime établi, la constante C est nulle, mais ce n’est pas le cas à l’enclenchement ; le flux est en effet nul à ce moment, abstraction faite d’un éventuel champ magnétique rémanent dans le noyau. Les conditions initiales à l’enclenchement du transformateur (t = 0) sont définies par la constante C, qui dépend elle-même :
- de la valeur et de la polarité du champ rémanent dans le noyau ;
- de la phase de la tension appliquée ;
- des caractéristiques du noyau.
En résumé :

Si nous considérons que φrest = 0, nous en déduisons ce qui suit :
- lorsque la tension du secteur est maximale à l’enclenchement, φ = φmax ;
- lorsque la tension est nulle à l’enclenchement, φ = 2 φmax.
Ce flux deux fois plus élevé va entraîner la saturation magnétique du noyau. La valeur de l’inductance du bobinage primaire est dès lors pratiquement nulle, et le courant n’est limité que par la valeur de la résistance ohmique de ce bobinage et du cordon d’alimentation.
La surintensité transitoire ne dure que quelque 10 ms, 3 à 6 ms en pratique, car la saturation du noyau n’est pas instantanée. N’oublions pas non plus qu’il faudra encore 4 à 10 périodes de la tension du secteur pour que le flux du champ magnétique et le courant dans le circuit se stabilisent.
Solutions possibles
Pour éviter la surintensité transitoire, on pourrait essayer – d’une manière ou d’une autre – de ne connecter le transformateur que lorsque la tension du secteur atteint son maximum.
C’est bien entendu correct, mais pour un bon fonctionnement, il faut que le champ magnétique rémanent du noyau soit nul au moment de la connexion du transformateur. Ce n’est pas du tout évident à garantir dans la pratique. Il existe des circuits qui mesurent ce champ rémanent, et qui permettent un enclenchement sans surintensité et sans faire appel à des résistances de limitation de courant ; ils sont relativement complexes.
Une autre possibilité est de surdimensionner le transformateur, pour retarder la saturation de son noyau. Cela fonctionne, mais le transformateur est plus cher, plus lourd et plus gros ; les pertes électriques augmentent aussi. Ces inconvénients ne sont a priori pas acceptables.
En général, on peut vivre avec ces surintensités : elles sont de courte durée et ne risquent pas d’endommager le transformateur ou d’autres composants. Pour des puissances un peu plus élevées, on se contentera aussi de limiter les surintensités, de manière passive ou active.

Le tableau 1 reprend les surintensités rencontrées sur quelques transformateurs. Pour des puissances supérieures ou égales à 300 VA, il est évident que la limitation des appels de courant à l’enclenchement est indispensable si on veut éviter que les fusibles nous sautent littéralement à la figure !
Limitation passive du courant d’appel
La limitation passive est réalisée avec des (grosses) résistances en série, ou des thermistances. Ces dernières ne sont que des résistances dont la valeur est proportionnelle ou inversement proportionnelle à la température. Il y en a donc à coefficient de température positif (CTP, PTC) ou négatif (CTN, NTC).
Pour la limitation de courant, on n’utilise que des thermistances à CTN. La valeur de leur résistance est plus élevée à froid qu’à chaud.
Dans le cas d’une limitation entièrement passive, on se contente de mettre une thermistance en série avec la charge. Lorsque l’appareil est éteint, la thermistance est à la température ambiante et elle limitera efficacement le courant lors de la mise en marche. Le courant à travers la thermistance va l’échauffer et la valeur de la résistance va chuter jusqu’à atteindre quelques ohms lorsque le courant aura atteint son intensité nominale. C’est une solution simple à mettre en œuvre, bon marché et fiable.
Les paramètres importants à prendre en compte sont la valeur « à froid » de la thermistance et le courant maximal admissible. La valeur de la résistance doit être choisie de telle manière que la surintensité limitée ne fasse pas griller le fusible et n’endommage pas le circuit en aval.
Nous allons maintenant dimensionner la protection d’un transformateur de 500 VA, dans un appareil protégé par un fusible avec une intensité maximale de courant (Ismax) de 10 A.
Calcul de la résistance à froid :
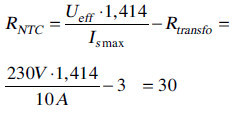
La résistance à froid de notre thermistance doit donc être de 30 Ω. Nous devons maintenant calculer l’intensité du courant à travers la thermistance en régime établi, en considérant que le transformateur est chargé au maximum :
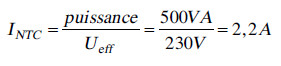
L’intensité de ce courant est de 2,2 A pour notre transformateur de 500 VA.
Il nous reste encore à calculer l’énergie qui devra être dissipée par la thermistance pendant le régime transitoire. Si nous considérons que la forme de l’impulsion est rectangulaire, l’énergie est égale au produit de la puissance à dissiper et de la durée :
Le tableau reprenant les caractéristiques des thermistances de la série S236 de TDK (fig. 1) ne reprend pas l’énergie maximale admissible, mais bien une charge capacitive maximale Ctest.
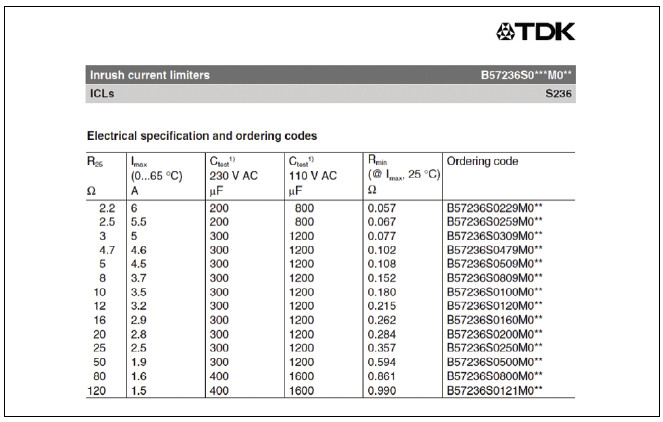
Pour les alimentations à découpage, c’est la valeur de la capacité à l’entrée du convertisseur ; cela nous permet de calculer l’énergie :

Certaines thermistances n’acceptent pas une charge suffisante, il faut alors choisir un modèle plus puissant ou connecter deux thermistances en série. C’est ce que nous avons fait pour notre circuit : deux thermistances de 16 Ω en série. Attention, il ne faut jamais connecter des thermistances en parallèle !
Inconvénients
Cette protection passive se retrouve dans bon nombre d’appareils du commerce, mais elle présente tout de même quelques inconvénients.
En premier lieu, la puissance dissipée dans la thermistance en régime établi. Même si la valeur de la résistance n’est alors que de 1/20ème à 1/10ème de la valeur à froid, la dissipation n’est pas négligeable, 8 W dans notre cas. À l’époque actuelle, ce n’est guère acceptable… En outre, la température à la surface de la thermistance est relativement élevée, 150 °C pour notre modèle.
On voit tout de suite qu’il n’est pas question d’éteindre et rallumer tout de suite l’appareil : il faut attendre une minute ou plus pour que la thermistance puisse à nouveau remplir son rôle de protection contre les surintensités transitoires.
Les soudures et certains composants n’apprécient pas non plus une température élevée. Ces composants – surtout ceux en plastique – devront être éloignés des thermistances.
C’est déjà mieux avec un relais
La figure 2 montre le schéma de principe d’une solution active très utilisée aussi. Une thermistance assure la protection au démarrage, mais le contact d’un relais est monté en parallèle, ce qui permet de la court-circuiter après un certain temps ; elle ne dissipe alors plus aucune puissance. Le relais dissipe encore de l’énergie (env. 1 W), mais c’est bien moins que les 8 W de la solution passive.
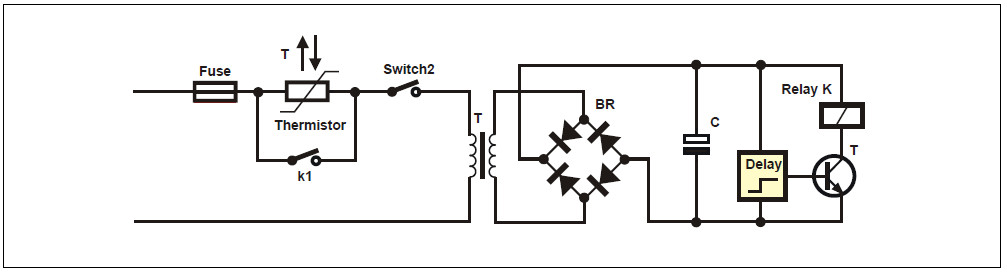
L’électronique de commande du relais est souvent alimentée par un transformateur séparé. Ce circuit est dissocié de l’alimentation de l’appareil, ce qui garantit un redémarrage sans problème en cas d’une courte panne de courant. Un autre avantage est que l’on peut remplacer l’interrupteur principal de l’appareil par un second relais commandé par une très basse tension.
De la théorie à la pratique
Après ces considérations théoriques, mais néanmoins intéressantes, il est temps de se retrousser les manches et de passer au projet proprement dit.
Notre circuit de démarrage en douceur était initialement destiné à un amplificateur de puissance avec une alimentation à découpage. Les opinions divergent quant à l’utilisation de ce type d’alimentation en audio, mais les avantages par rapport à une alimentation traditionnelle ne sont pourtant pas négligeables. Le rendement est bien meilleur, et l’encombrement et le poids sont nettement moindres. Cela permet la conception d’amplis plus petits et légers, qui peuvent facilement trouver leur place dans une petite enceinte acoustique par exemple. La régulation inhérente à une alimentation à découpage apporte aussi une certaine sécurité sur les charges variables : hormis les fluctuations transitoires, l’amplitude de la tension restera toujours dans une plage sûre. Avec la bonne topologie, le bruit et la distorsion ne sont pas un problème non plus.
Il existe aujourd’hui des alimentations à découpage spécialement conçues pour l’audio, voir par ex. ici.
Schéma de principe
Nous avons opté pour un circuit commandé par un microcontrôleur. Il y a des possibilités d’extension sans trop d’ajouts matériels, par ex. pour la mise en service et l’arrêt automatiques commandés respectivement par la détection de la présence ou l’absence d’un signal audio. Un récepteur infrarouge (IR) permet également la commande d’un potentiomètre de volume motorisé. Le schéma de principe du circuit est repris en figure 3.
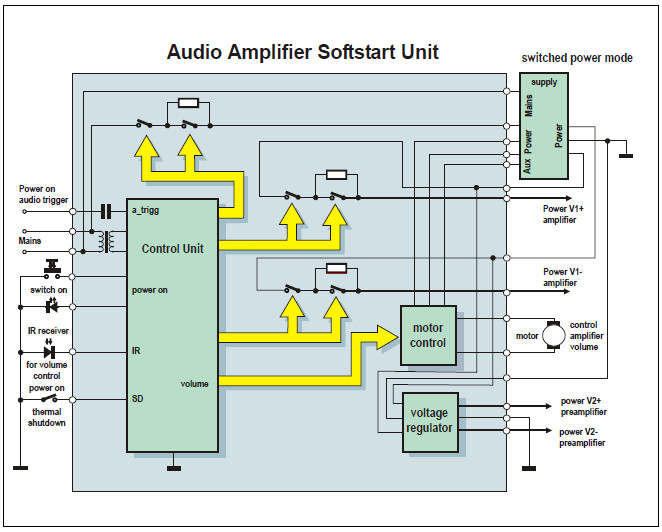
Le microcontrôleur est au cœur du circuit, et malgré son omniprésence on peut se contenter d’un relativement modeste ATtiny44. Le circuit de démarrage en douceur est alimenté via son propre transformateur, à gauche sur le schéma. La tension du secteur va aussi – via un circuit de protection à relais et thermistance – vers l’alimentation de l’amplificateur de puissance, en haut à droite.
Cette dernière fournit les tensions positive et négative V1+ et V1– nécessaires à l’ampli. Un circuit avec relais et thermistances fournit une protection supplémentaire pour ces tensions. Les tensions V2+ et V2–, pour par ex. l’alimentation d’un préamplificateur, sont régulées avec des circuits intégrés standard. L’alimentation du moteur du potentiomètre de volume provient aussi du circuit d’alimentation de l’ampli.
Schéma détaillé
Les sous-ensembles du schéma de principe se reconnaissent aisément sur le schéma détaillé de la figure 4. En haut à gauche, on retrouve la partie secteur (K9, K1 et K11) : la tension entre sur K1, et ressort sur K11 pour l’alimentation à découpage de l’ampli.
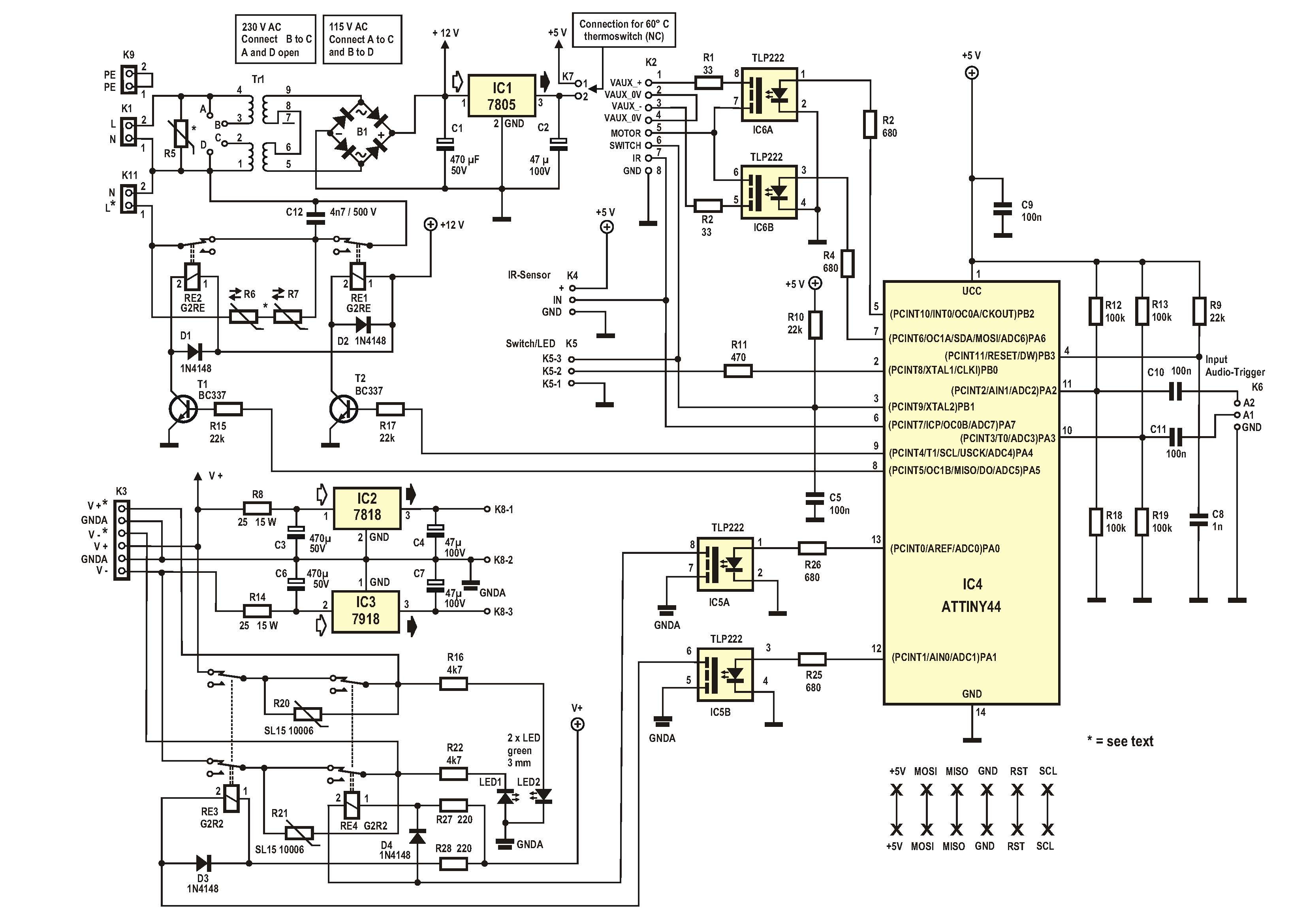
Le bornier K9 n’a pas de fonction définie, mais il permet le raccord éventuel d’une protection de mise à la terre (PE, Protective Earth).
Les tensions délivrées par l’alimentation à découpage pour l’amplificateur, V+, GNDA et V–, entrent sur K3. Les tensions V2+ et V2–, régulées par un 7818 (IC2) et un 7918 (IC3) permettent d’alimenter en ±18 V un éventuel préamplificateur. Les tensions V+ et V– ressortent via les relais RE3 et RE4 comme V+* et V–* vers l’ampli. Les deux LED vertes indiquent le bon fonctionnement.
La tension VAUX, délivrée par l’alimentation à découpage, permet la commande d’un potentiomètre de volume motorisé. La tension entre sur K2 et est commutée par les relais bidirectionnels à MOSFET des deux optocoupleurs d’IC6 en fonction des besoins.
Le bouton-poussoir pour la mise en marche et l’arrêt manuels ainsi que la LED associée sont raccordés à K5. Le récepteur IR est quant à lui raccordé à K4.
Le récepteur IR
La possibilité de commander l’amplificateur à distance est particulièrement attractive, mais cela soulève quelques questions. Le gros problème est de déterminer pour quelles télécommandes – en fait quels protocoles de transmission de données – il faut écrire le logiciel. Il existe un très grand nombre de commandes à distance par infrarouge différentes, et presque autant de protocoles de transmission.
Nous avons donc abandonné l’idée de choisir une télécommande particulière et d’adapter le logiciel en conséquence. Un microcontrôleur peut apprendre – dans certaines limites – quelques commandes de télécommandes usuelles ; c’est cette solution qui a été retenue.
Pour éviter toute déconvenue, nous avons appliqué le principe KISS (Keep It Stupid Simple). Le microcontrôleur n’a que trois commandes à apprendre ; elles suffisent pour piloter notre amplificateur :
- marche/arrêt
- volume +
- volume –
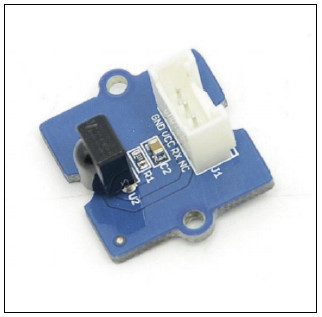
Le récepteur IR est un modèle bon marché facilement trouvable ; ça ne vaut vraiment pas la peine de le fabriquer soi-même… Ces récepteurs (fig. 5) décodent même le signal reçu et délivrent un signal numérique qui peut directement une entrée du microcontrôleur. Si vous êtes intéressé par le sujet, consultez le site.
Et encore un extra : on peut raccorder à K7 un thermostat qui arrêtera l’amplificateur si la température à l’intérieur du boîtier menace de grimper dangereusement (plus de 60 °C).
Le logiciel
Nous avons écrit le programme de l’ATtiny44 en assembleur avec ATMEL Studio 7. Le microcontrôleur retenu a de nombreuses possibilités matérielles et une bonne capacité de mémoire ; cela a permis d’obtenir un code compact (parce que nous avons tenu compte de ces possibilités). Nous n’allons pas nous étendre sur ce code, vous pouvez télécharger et analyser le micrologiciel si vous le souhaitez.
Une fonction des plus intéressantes de l’ATtiny est la fonction de capture (Capture Function), qui nous a bien servi pour la télécommande. Elle permet le chargement du contenu du registre de capture (compteur sur 16 bits) à chaque flanc du signal sur l’entrée ad hoc. On peut donc mesurer une durée de manière précise (de l’ordre de quelques µs).
La figure 6 montre le diagramme états-transitions du logiciel. Le microcontrôleur commande quatre relais (relais K1 à K4 sur le diagramme, RE1 à RE4 sur le schéma) pour la mise en marche et l’arrêt. Le bouton-poussoir pour la commande manuelle est appelé Button sur le diagramme. Tout le processus se déroule de manière séquentielle.

Tout d’abord le relais RE2 est ouvert pour activer la thermistance R6/R7, puis le circuit est fermé peu après par RE1. Après écoulement de la temporisation WAIT1, RE2 est activé pour court-circuiter la thermistance. L’alimentation à découpage est à ce moment connectée au réseau, mais n’alimente pas encore l’amplificateur.
Les thermistances R20 et R21 sont d’abord mises en circuit par RE4 ; elles servent à limiter le courant de charge des condensateurs de filtrage de l’amplificateur, dont la capacité peut être d’une valeur relativement élevée. Il s’agit avant tout d’éviter que l’alimentation à découpage se mette en état de protection (et y reste) à cause d’une surcharge temporaire. Après un court laps de temps, RE3 enclenche l’alimentation de l’ampli puis, après écoulement de la temporisation WAIT2, RE4 court-circuite les thermistances.
Apprentissage des commandes
Le mode d’apprentissage est activé en pressant le bouton-poussoir de commande manuelle tout en connectant l’appareil au réseau. Ensuite on appuie sur la touche souhaitée de la télécommande (marche/arrêt) ; le signal est reçu par le récepteur IR et entreposé en mémoire EEPROM par le microcontrôleur. La LED indique la bonne réception. Pour enregistrer la deuxième commande, il faut appuyer à nouveau sur le bouton-poussoir, puis sur la touche de la télécommande ; idem pour la troisième touche à enregistrer.
Comme précisé auparavant, seules trois commandes peuvent être enregistrées : la première est pour marche/arrêt, la seconde pour augmenter le volume (volume +), et la troisième pour le diminuer (volume –).
Une dernière remarque sur le matériel
Nous avons prévu la possibilité d’une mise en marche et d’un arrêt automatiques : dès qu’un signal audio est présent sur l’entrée différentielle du microcontrôleur (broches 10 et 11) via K6, le circuit se met en marche de manière séquentielle comme décrit ci-dessus. Le seuil de détection est d’environ 20 mV. Si aucun signal n’est détecté pendant une période de ± 5 min, le dispositif se déclenche ; la consommation pendant la période d’attente est de moins de 1 W.
L’alimentation à découpage utilisée sur notre amplificateur est un modèle SMPS300RE (300 W) de Connex Electronics. Elle délivre également une tension auxiliaire de 12 V, qui sert pour la commande du potentiomètre motorisé de volume. L’alimentation est connectée dans un sens ou dans l’autre au moteur, via les relais bidirectionnels à MOSFET d’IC6. Les résistances R1 et R2 limitent l’intensité du courant. Chaque pression sur une des deux touches de volume de la télécommande met le moteur en marche dans un sens ou dans l’autre, pendant 500 ms.
Lorsqu’il est en fonctionnement, le circuit peut aussi être mis hors service en appuyant sur le bouton-poussoir.
Montage
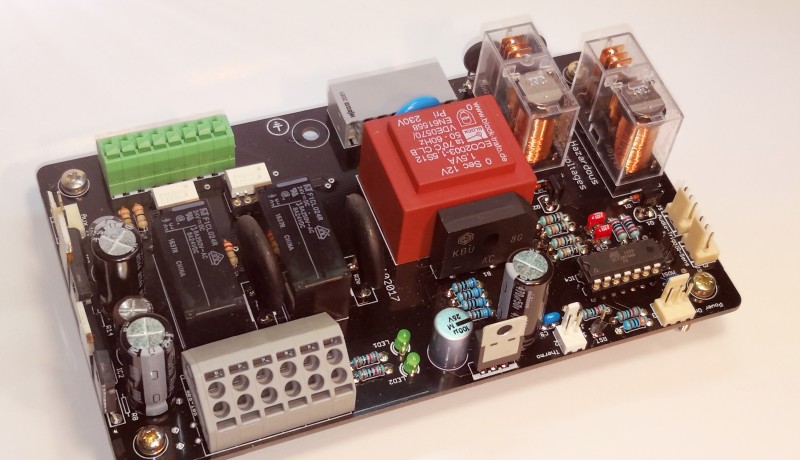
Nous avons dessiné un circuit imprimé à double face pour le circuit (fig. 7). Beaucoup d’entre vous seront sans doute heureux d’apprendre qu’il n’y a pas le moindre CMS, tous les composants sont des « bons vieux » traversants…
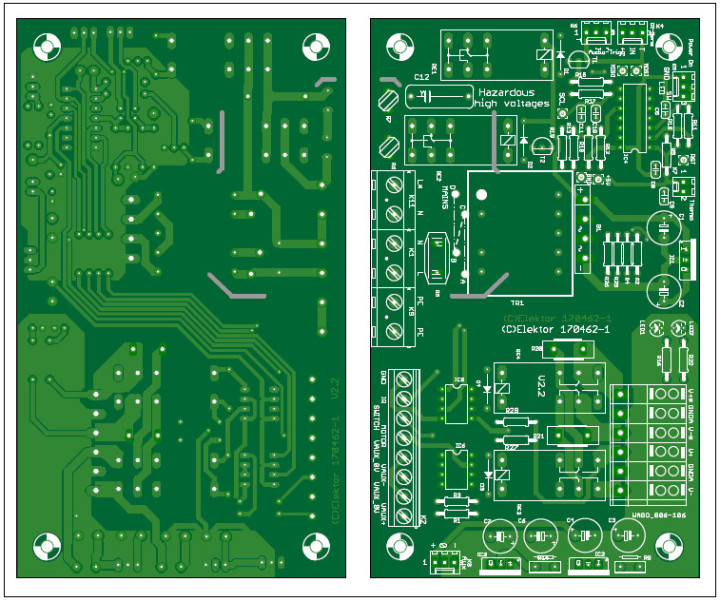
Circuit imprimé nu | Microcontrôleur programmé | Programmateur ISP pour AVR
Le circuit initial, conçu pour l’Europe, a été « internationalisé » et peut être utilisé sur les réseaux 230 V ou 115 V. Il faudra donc faire attention au choix et au câblage de certains composants.
- Le transformateur possède deux primaires. Pour le 230 V, on doit raccorder les points B et C du circuit imprimé avec du fil isolé ; les points A et D ne sont pas raccordés entre eux. Pour le 115 V, A est raccordé à C et B à D, avec du fil isolé
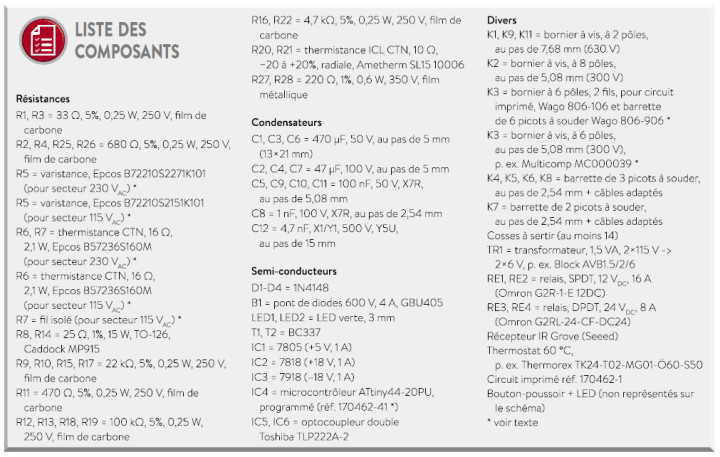
- La valeur de la varistance R5 est différente pour le 230 V et le 115 V : consultez la liste des composants
- Les thermistances R6 et R7 ont la même valeur quelle que soit la tension. Pour le 230 V, elles doivent être montées toutes les deux, alors que pour le 115 V une des deux doit être remplacée par un fil isolé
Une remarque concernant K3 : nous avons utilisé un modèle spécifique de Wago, qui sera peut-être difficile à trouver hors d’Allemagne. On peut le remplacer par un bornier standard à six pôles au pas de 5,08 mm, par ex. un modèle de Multicomp (voir liste des composants). Si vous utilisez le modèle de Wago, n’oubliez pas la barrette de picots à souder adaptée !

Le circuit imprimé est disponible dans l’e-choppe, de même que l’ATtiny44 programmé. Si vous souhaitez programmer le microcontrôleur vous-même avec un AVRISP, vous pouvez télécharger gratuitement le code sur la page du projet. Les connexions nécessaires (5V, MOSI, MISO, GND, RST et SCL) sont sur le circuit imprimé.
Un dernier rappel important : certaines parties du circuit imprimé véhiculent des tensions potentiellement mortelles. Veillez donc à assembler votre montage de telle manière que l’on ne puisse toucher ces parties par inadvertance. Cela vous permettra de jouir longtemps de ce projet en écoutant votre musique préférée.
(170462-04 – version française : Jean-Louis Mehren)
Elektor est réputé pour la qualité de son contenu.
En voulez-vous davantage ?
--> Abonnez-vous maintenant au magazine Elektor et ne manquez plus jamais ni aucun de ces articles précieux ni aucun de ces projets géniaux.
Discussion (0 commentaire(s))