
Interface AS : les bases – bus pour l’automatisation industrielle
sur
Fonctionnement du bus pour l’automatisation industrielle
Au début, tout était commandé à l’aide de câblage fait maison et de formats de données propriétaires. Cette approche est pourtant depuis longtemps révolue en automatisation industrielle. Désormais on utilise des cartes dernier cri et des systèmes de bus spécialisés. Outre l'avantage évident d'être facile à maintenir et à développer, il existe une autre raison à cela : une norme industrielle largement répandue garantit la disponibilité à long terme du matériel et des logiciels, du moins dans une certaine mesure. Vous trouverez ci-après un aperçu de l'interface AS.

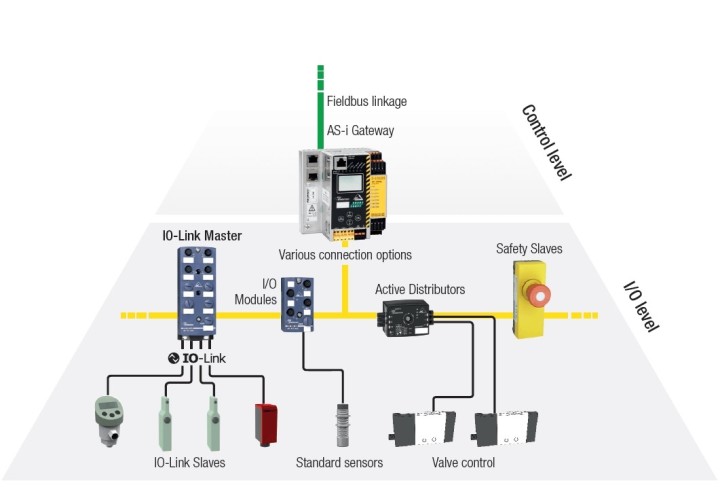
Lorsque des processus de fabrication complexes doivent être automatisés, on se tourne vers la structure d’automatisation présentée à la figure 1. Au plus bas niveau se trouvent les capteurs et les actionneurs. Pour des raisons de coût et d’efficacité, on renonce à la communication avec ceux-ci à l’aide d’un câblage Ethernet. Par ailleurs les liaisons à courte distance avec des protocoles tels que SPI ou I²C sont incompatibles avec l’environnement souvent sévère des usines de production [1].
Deux techniques largement répandues sont disponibles pour la connexion de composants tels que des capteurs : le protocole ASi (interface actionneur-capteur), connu sous le nom d’interface AS, et le protocole IO-Link (normalisé sous le nom SDCI), piloté par l’environnement Profibus. Le principal avantage de l’interface AS est qu’un maître peut s’adresser à un grand nombre d’esclaves via un seul port. Avec IO-Link, vous avez normalement besoin d’un port et d’un câble par esclave. IO-Link est considéré dans la littérature anglaise comme plus approprié en cas de systèmes à gros volumes de données.
Notons que ASi et IO-Link apparaissent souvent « ensemble ». Le système Bihl-Wiedemann illustré à la figure 2 et décrit en détail dans [2] utilise IO-Link pour collecter les informations. Les datagrammes compressés sont ensuite transmis au maître via ASi.
Une question de version
L’interface AS a vu le jour en 1990 à la suite de la fusion d’un groupe de sociétés qui ont créé une sorte de pôle d’intérêt sous le nom d’AS-International Association. Celui-ci détient les droits de la « marque » AS Interface et vend des produits selon la norme officielle. La cotisation est actuellement d’environ 4000 €/an (au cas où vous souhaiteriez devenir membre).Vous souhaitez simplement jeter un coup d’oeil à la norme ? Il y a une solution moins coûteuse : l’interface AS est définie par un ensemble de normes industrielles, dont la plus populaire, et de loin, est la norme EN 62026-2:2015. Au comité officiel de normalisation, le document correspondant vous coûtera « seulement » environ 250 €. Si vous ne craignez pas l’effort d’une recherche personnelle, vous le trouverez aussi dans les bibliothèques des universités techniques ou des grandes écoles. Un prêt entre bibliothèques ou instituts concernés vous aidera si les documents n’étaient pas disponibles directement.
Vous souhaitez approfondir le sujet ? Vous aurez peut-être du mal à le faire, car à l’heure actuelle deux versions d’ASi coexistent sur le marché. Seule la version 3.0 est actuellement disponible que ce soit pour les spécifications ou le matériel. Cependant, depuis le salon SPS IPC Drives 2018, la version 5.0 apportant des améliorations a été largement évoquée.
La difficulté de ce développement somme toute banal, c’est que la spécification exacte du protocole version 5.0 (au moment de la rédaction de cet article) n’est même pas encore accessible à tous les membres. Selon des informations privilégiées, vous ne les obtiendrez que si vous êtes impliqué dans le développement ultérieur du protocole.
Il en résulte des phénomènes « intéressants » : les circuits intégrés émetteurs-récepteurs de la version 3.0 (détails ci-dessous) proviennent de la société ZMD, achetée entretemps par IDT, elle-même reprise par Renesas. Pour la version 5.0, on travaillera donc avec Renesas, dont la philosophie d’entreprise peut être résumée par : « Nous mettons en oeuvre tous les protocoles ».
Câble ASi
La capacité « multidrop » (bus multipoint) de l’ASi est due en partie à la structure des câbles. Il s’agit d’un câble à deux fils qui transmet les signaux AS+ et AS−. AS− est la « masse », tandis que AS+, le signal positif. Notez que la « mise à la terre » de AS− n’est autorisée en aucun cas.Concrètement : dans les installations, les câbles de données ASi sont presque toujours de couleur jaune. Le câble asymétrique typique est illustré à la figure 3, il présente une section transversale en forme de nez. Un câble noir optionnel de construction similaire est destiné à fournir une alimentation supplémentaire aux terminaux.

Le « nez » empêche toute inversion de polarité accidentelle
(image : d’après Bihl + Wiedemann).
La plupart des appareils ASi disposent de connecteurs pour les câbles conformément à la figure 3, avec lesquels, lors de la pose, des dents percent l’isolant et établissent ainsi un contact galvanique avec les deux brins. Il est donc facile et sûr de rajouter un nouveau périphérique à un bus ASi. Bien que cette procédure soit courante et pratique, vous pouvez aussi utiliser n’importe quel autre câble pour créer un bus ASi.
À l’instar du bus « One-Wire » qui convient à la connexion directe de capteurs à un système à microcontrôleur, l’interface AS requiert également que l’alimentation d’appareils à faible consommation puisse être fournie directement par le bus. La tension nominale est de 24 V ; d’après la spécification, il est théoriquement possible de véhiculer jusqu’à 8 A sur le bus. Mais dans la pratique, au-delà de 2 A, il est recommandé de tenir compte de la chute de tension dans le câble et les connecteurs.
Il est important que l’interface AS soit libre de potentiel et n’aie pas de référence à la terre. Comme déjà mentionné, une mise à la terre est explicitement interdite. Outre des esclaves AS à part entière, il existe aussi l’option de seulement alimenter les périphériques ASi. Vous pouvez alors tirer jusqu’à 400 mA de la ligne 24 V, mais vous n’obtiendrez pas d’adresse et serez déconnecté de la communication. Comme un bus ASi peut avoir une longueur allant jusqu’à 100 m (voire 300 m avec une terminaison appropriée), il convient parfaitement pour alimenter des systèmes tiers à faible puissance. Un tel appareil est alors simplement connecté à AS+ et AS−.
L’alimentation d’un système ASi est généralement assurée par une alimentation appropriée, dont la structure est illustrée à la figure 4. Conceptions et constructions personnelles dans ce domaine professionnel sont strictement déconseillées. Vous trouverez sur le site web de l’association ASi des liens vers de nombreuses entreprises proposant des produits certifiés.
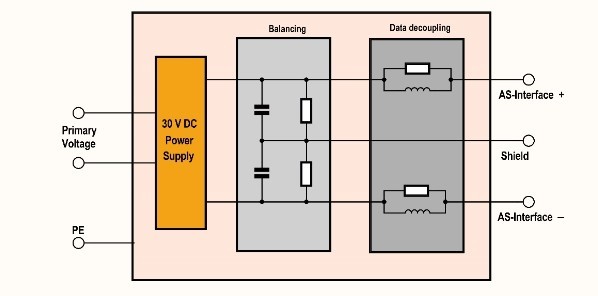
Il est intéressant de noter que les alimentations fournissent systématiquement une tension continue de 29,5 à 31,6 V. Cette augmentation par rapport à 24 V est nécessaire pour compenser les chutes de tension dans les câbles et les connecteurs. Cependant, la très grande immunité aux interférences d’un système ASi ne constitue pas une carte blanche à un câblage négligé ou imprudent. Si vous tirez des câbles ASi dans une même baie, à proximité de câbles pollués par une ligne d’alimentation, vous risquez de vous exposer à des perturbations difficiles à détecter. Une présentation de Phoenix Contact fournit plus d’informations sur la réalisation d’une installation.
Communication
Le câble illustré à la figure 3 montre clairement qu’il n’existe pas de lignes distinctes pour l’alimentation et les données. Il s’ensuit que les informations doivent d’abord être démodulées/transformées avant leur utilisation.Les données sont transmises par APM (Alternate Pulse Modulation). Cette méthode s’appuie sur le codage Manchester qui combine horloge et chaîne de bits à transmettre. L’étape suivante consiste à s’assurer que le flux de bits codé par Manchester est converti en courant. Selon les informations librement disponibles, son amplitude est comprise entre 0 et 60 mA.
Les fronts négatifs entraînent une augmentation du courant de transmission, et les fronts positifs correspondent à une réduction. En raison de l’inductance de la ligne, ces changements de courant se transforment ensuite en impulsions de tension d’environ ±2 V par rapport à la tension nominale. Il est important aussi que le début d’un datagramme s’accompagne toujours d’une impulsion négative, ce qui est utile pour le déclenchement d’oscilloscopes numériques ou d’analyseurs de signaux.
Malheureusement, les fabricants d’oscilloscopes ont jusqu’à présent montré peu d’intérêt pour l’intégration dans leurs appareils de décodeurs adéquats prêts à l’emploi. Même les produits de Pico Technology en sont dépourvus. Cependant, cette tâche peut être affectée à un outil tiers grâce à une API.
Certes, vous ne voudrez pas implémenter vous-même le décodeur pour votre propre module ASi ; la société IDT, déjà mentionnée, propose avec l’ASSI4U une puce d’émission-réception qui peut fonctionner à la fois en tant que maître et en tant qu’esclave. La figure 5 montre le circuit de base tiré de la fiche technique.

Notez les deux LED, représentées verte et rouge par IDC dans sa fiche technique. En fait, le bus ASi spécifie que de telles LED soient présentes sur les esclaves. Elles donnent des informations sur le fonctionnement ; vous trouverez des informations supplémentaires dans la fiche technique mentionnée ci-dessus.
Les broches marquées DIx et DOx sont les entrées et sorties. Si un émetteur-récepteur est connecté en mode esclave, alors il dispose des informations transmises sur le bus. Les entrées marquées Px sont utilisées pour définir des paramètres. Elles jouent un rôle important en particulier dans le mode maître, que nous ne présenterons pas ici.
La norme de communication
Maintenant que vous en savez un peu plus sur les caractéristiques électroniques d’un système ASi, passons à la logique du format de communication. La communication est en fait strictement gérée par le maître. Le maître exécute des processus cycliques de scrutation (polling) : il scrute les esclaves présents sur le bus les uns après les autres. Normalement les esclaves répondent avec des données utiles d’une longueur de 4 bits, après quoi le cycle recommence (voir figure 6).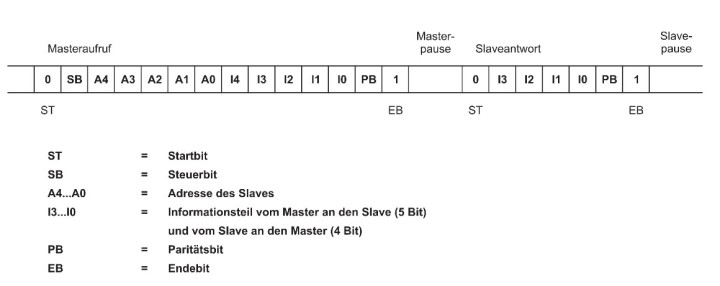
Le format d’adresse définit le nombre maximal de périphériques pouvant être adressés. Dans les datagrammes « normaux », seuls cinq bits d’adresse sont disponibles et l’adresse « 0 » est réservée à un nouvel esclave. Il reste donc 31 adresses possibles pour des esclaves. Les périphériques apparaissant avec l’adresse 0 se voient attribuer une nouvelle adresse disponible par le maître.
Avec un système ASi, la scrutation cyclique est suivie par un temps de réponse déterministe. Pour ASi 3.0, il est d’environ 5 ms, tandis que la nouvelle version 5 ne prévoit un temps de cycle que de 1,2 ms pour 24 utilisateurs. En outre, avec ASi 5.0, le nombre maximal d’esclaves est nettement plus élevé, à savoir 96.
Il est particulièrement important de pouvoir transmettre des données ou des paramètres. Un bit d’information indique le type d’information présente sur le bus. Par ailleurs un bit de contrôle différencie les adresses des commandes.
Comment procéder ?
Il vous faudra avoir une approche économique, que vous utilisiez un système ASi déjà existant, ou envisagiez de construire un nouveau système ASi. Certes la conception de modules avec capteurs peut être amusante, mais en pratique elle n’est pas rentable. Il existe déjà de nombreuses entreprises actives dans ce domaine. Elles proposent presque tous les capteurs et actionneurs imaginables équipés de l’interface AS. Il est donc beaucoup plus efficace de composer son propre système complet à partir de ces composants, et de le proposer à vos clients accompagnés de service de conseil.Vous voulez vraiment expérimenter avec l’ASi ? Vous joindrez alors tôt ou tard l’organisation de normalisation. La norme a beau livrer toutes les informations nécessaires, la puce de l’émetteur-récepteur ASI4U a beau être disponible sur le marché selon oemsecrets.com, il s’en suit quand même une grande question.
Le problème, ce sont les droits sur la marque. Il devient vite juridiquement problématique d’utiliser le nom ASi ou même le logo ASi sans autorisation explicite. Ce n’est probablement qu’une question de temps avant que des plaintes ne soient déposées, si d’aventure vous vous risquez à proposer votre système sur le marché.
Cette situation n’est certes pas satisfaisante pour le technicien en électronique féru de travaux de laboratoire. D’un autre côté, travailler avec des systèmes ASi peut avoir un impact très positif sur votre compte en banque, car dans le domaine de l’automatisation industrielle, les honoraires relativement élevés des développeurs et consultants sont la norme. Cela peut compenser correctement l’effort consenti.
Littérature
[1] J. M. Jacob, Industrial Control Electronics, page 260 et suivantesSéminaire en ligne
La chaîne YouTube de Pepperl+Fuchs propose une présentation succincte de la norme ASi.Conseil : lisez la fiche technique !
En raison de sa taille, cet article ne peut donner qu’un aperçu général de la norme ASi. Par conséquent, il est impératif d’étudier dans le détail la fiche technique asi4you d’IDT avant toute démarche pratique.(190124)
Discussion (0 commentaire(s))