
La lévitation magnétique sans peine
sur

Par Peter Neufeld (Allemagne) et Luc Lemmens (Elektor)
Sur Wikipedia, la lévitation est décrite comme le "fait, pour un objet, de se déplacer ou de rester en suspension au-dessus du sol, sous l'effet d'une force connue". En effet, l'objet est soumis à une force ascendante égale à la force gravitationnelle terrestre. La force électromagnétique est l'une des options de conception d'un projet de lévitation électronique. En théorie, une architecture à deux aimants permanents ferait également l'affaire, mais cet équilibre est instable et en réalité toutes sortes de facteurs le perturbent et le rompent, on utilise donc des électroaimants. Un circuit de commande peut alors réguler le champ magnétique pour maintenir l'objet flottant en place. Cela requiert un asservissement basé sur un signal représentatif de la position de l'objet flottant. Pour les deux projets décrits dans les pages d'Elektor Labs, un capteur à effet Hall mesure l'intensité du champ magnétique entre un électroaimant immobile, fixé à un cadre et un aimant permanent qui "flotte" au-dessous. La tension de sortie du capteur fournit un signal repésentatif de la distance entre les deux. Le terme d'asservissement évoque souvent des souvenirs de calculs et de circuits élaborés et complexes nécessaires pour réaliser un système de commande stable, mais Peter Neufeld montre que cela peut être résolu de façon simple.
Les projets de lévitation attirent toujours le regard : il est toujours fascinant de voir qu'un objet flotte tout seul dans l'air. Cela semble magique, comme si les lois de la gravité ne s'appliquaient plus à cet objet, mais il n'en est rien. J'ai trouvé extraordinaire que cela puisse être fait avec si peu d'électronique. Les projets de lévitation magnétique que j'avais vus avant ceux de Peter semblaient bien plus difficiles à réaliser, souvent avec des bobines faites maison, et des courants élevés. Quoi qu'il en soit, les vidéos que Peter a postées prouvent que c'est possible, même s'il reconnait qu'il faut une certaine précision et de la dextérité pour obtenir un bon calibrage. Pour savoir si cela fonctionne, il suffit de l'essayer
Cet article couvre le projet dit easy way, c.-à-d. celui qui utilise un comparateur analogique pour asservir l'électroaimant. L'article s'intéresse surtout au fonctionnement de la lévitation. Dans un prochain article, la version avec M5Stack Atom ESP32 Pico sera exposée en soignant l'esthétique pour créer un gadget de lévitation agréable à observer.
Matériel pour la version analogique
Le schéma de la fig. 1 montre que seul un matériel très simple est nécessaire pour réaliser ce projet.
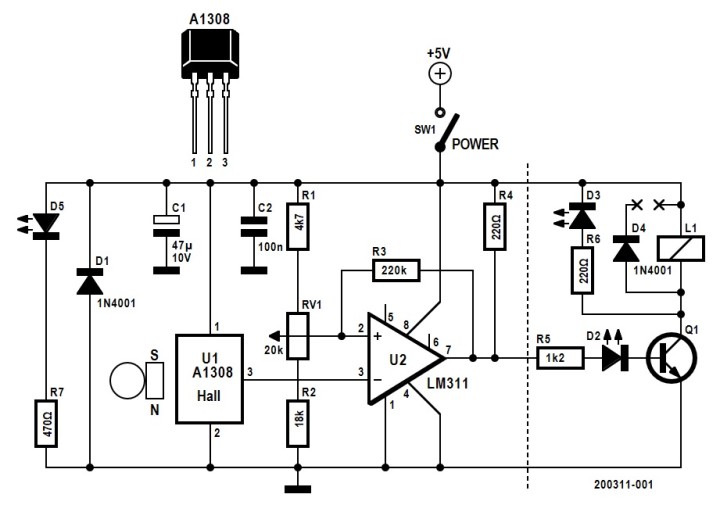
L1 représente la bobine d'un relais, sans mécanisme de commutation. Elle appartient à une carte relais standard (voir ci-dessous) fixée à un cadre avec le noyau dirigé vers le bas, l'objet en lévitation (avec un aimant permanent) reste en suspension sous cette bobine. R6 et la LED3 remplacent la diode flyback D4 sur cette carte et servent d'indicateur optique pour l'étalonnage du circuit de lévitation. Le capteur Hall U1, monté sur le noyau, mesure le champ magnétique entre L1 et l'objet flottant ; sa sortie est connectée à l'entrée inverseuse du comparateur U2, un LM311. L'entrée non-inverseuse d'U2 est connectée au curseur de RV1, trimmer de réglage du circuit d'asservissement et R3 fournit une petite hystérésis au comparateur. La sortie du comparateur active la bobine lorsque la tension à la sortie du capteur à effet Hall est inférieure au niveau défini par le curseur de RV1.
La LED D5 indique la mise sous tension et SW1 est l'interrupteur M/A. D1 est une diode de protection contre l’inversion accidentelle de la polarité d'alimentation (montage crowbar).
Obtenir les (bons) composants
La plupart des composants du schéma et de la nomenclature sont standard, seuls les capteurs à effet Hall A1302 ou A1308 d'Allegro sont un peu plus difficiles à trouver. Les capteurs moins chers et plus largement disponibles comme le SS49 n'ont pas fonctionné dans les prototypes des projets de Peter, sans doute parce que le signal de sortie ne réagit pas assez vite lorsque le champ magnétique varie, mais cela n'a pas été étudié de près.
Étonnamment, la partie la plus difficile à trouver fut la carte à relais utilisée pour l'électroaimant. Ces modules sont disponibles sur internet dans beaucoup de boutiques en ligne (makers et Arduino) et vous devriez pouvoir en acheter sans peine. Peter avait testé des cartes marquées HW-482 avec des relais de type JQC-3FF-S-Z et JQC3F-05VDC. J'ai (ré)appris une leçon très importante quand on fait des achats sur Internet : ne jamais se fier aux photos publiées ! Sur Amazon, j'ai trouvé exactement la même carte que celle dont Peter a posté la photo. J'ai reçu des modules dont la carte était marquée HW-307 et le relais identifié sous FL-3FF-S-Z. Ils marchent comme décrit et promis en ligne, c'est-à-dire relais SPDT de 5 V et transistor de commande, diode flyback et LED de signalisation, mais le transistor de cette carte est un PNP, contrairement au NPN des cartes relais testées par Peter. J'ai quand même essayé, en dehors du type et de la marque, le relais était semblable à celui utilisé dans le projet original ; J'ai vu plus tard que l'intérieur aussi. Pour ce projet, la bobine et le noyau du relais sont tout de même cruciaux.
J'ai empilé deux ou trois aimants au néodyme en forme de disque d'un diamètre de 8 à 12 mm et d'une épaisseur de 2 à 3 mm. La taille et le nombre d'aimants nécessaires dépendent bien sûr du poids à faire léviter (figurine Lego ou autre). J'ai commencé par une simple pile de deux aimants (Ø10 mm, hauteur de 2 mm) et je vous recommande d'expérimenter avec un objet tout aussi simple pour appréhender le comportement du réglage d'asservissement. Mieux vaut marquer le dessus de la pile avec un marqueur permanent ou du ruban adhésif pour noter la bonne orientation. Une fois que ça marche, continuez avec d'autres aimants et ajoutez un objet (par ex. figurine Lego). Il va se soi que la taille et le poids de la charge pouvant être mise en lévitation avec ce matériel sont limitées. Dans cet article, le terme aimant(s) fait référence à la charge complète, c.-à-d. pile d'aimants plus charge optionnelle.

Montage
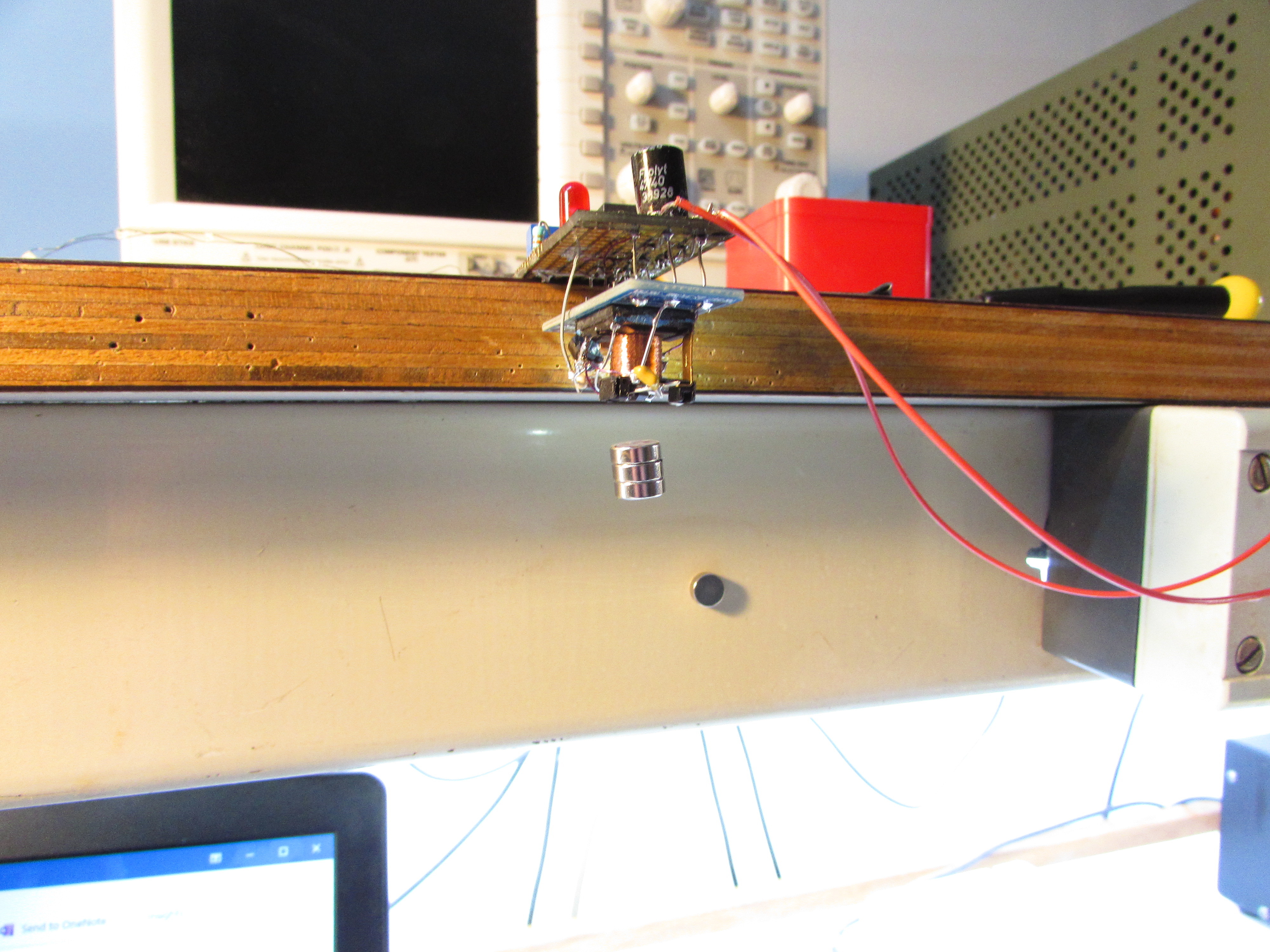
Aucune carte imprimée pour ce projet, mais un morceau de Veroboard ou même une plaque d'essai fait l'affaire. La fig. 2 montre un aperçu du prototype original.
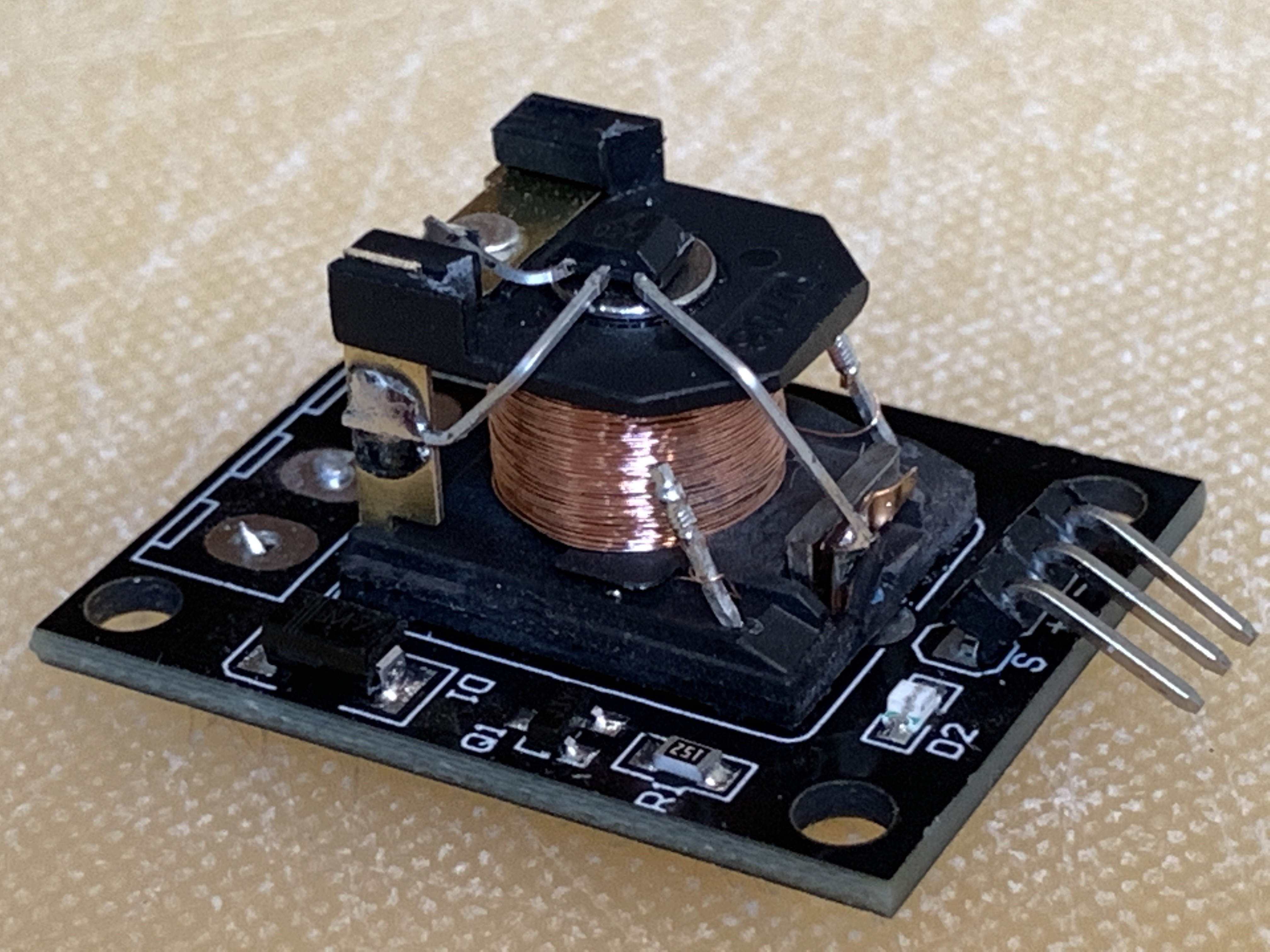
Si vous construisez le matériel de ce projet, commencez par retirer le bornier à 3 voies de la carte relais afin d'avoir plus d'espace pour accéder au relais. Étudiez les photos de Peter (fig. 3 ) pour voir ce qu'il faut faire avec le relais, à savoir : retirer le couvercle et le mécanisme de commutation, seuls la bobine et le noyau sont utilisés. Raccourcir le circuit magnétique (de U en J) pour ne pas court-circuiter le champ. Une meule sur miniperceuse (Dremel ou autre) convient pour couper les pièces métalliques.

Quel que soit le type de carte relais, la diode écrêteuse D4 doit être ôtée et remplacée en ajoutant R6 et la LED blanche D3. Avec la carte relais achetée par Peter, la partie la plus à droite du schéma de la fig. 1 est alors terminée, y compris Q1, R5 et D2 qui sont présents d'origine. Dans mon cas, je n'ai gardé que la bobine du relais, j'ai enlevé les autres pièces et reconstitué cette partie du circuit avec des composants traversants. Pour Q1, tout transistor NPN standard (par ex. BC550) convient pour commander la bobine du relais. Rétrospectivement, vu les cartes que j'ai reçues, il aurait été plus logique de n'acheter que le relais, mais ces petits modules produits en série sont probablement moins chers qu'un relais séparé.
Notez que les références des pièces de la carte de relais du schéma (L1, R5, D2 Q1 et D4) ne correspondent pas aux références des composants sur la carte. Il n'est pas difficile d'identifier la diode écrêteuse D4 qui doit être retirée.
Le capteur à effet Hall est posé directement sur le noyau de la bobine, alignez-le au centre de la surface du noyau comme indiqué sur la fig. 4. Collez un mince morceau de plastique sur le capteur et ses broches pour éviter de court-circuiter l'alimentation si l'aimant vient se coller au noyau.
Construire le reste du circuit en utilisant la carte relais modifiée et un morceau supplémentaire de Veroboard n'est pas difficile. Cependant, le câblage de la bobine et l'orientation de l'aimant permanent et du capteur à effet Hall sont très cruciaux pour que la lévitation magnétique fonctionne :
- quand l'aimant permanent se rapproche de la bobine et du capteur, la tension de sortie de ce dernier doit augmenter ;
- quand la bobine est alimentée, son champ magnétique doit attirer l'aimant.
Cela ne fonctionne que si ces deux conditions sont remplies. La 1ère condition est facile à vérifier en mesurant la tension de sortie du capteur Hall à l'aide d'un multimètre ; il suffit de retourner l'aimant si la tension diminue en l''approchant du capteur. Pour la seconde... Je pouvais sentir l'attraction entre la bobine alimentée et l'aimant, tout semblait correct.
Le circuit de commande que j'avais construit semblait bien fonctionner puisque les deux LEDs s'allumaient quand il le fallait : D2 avec la bobine allumée, D3 clignotait avec la bobine éteinte alors que l'aimant se rapprochait de la bobine. Il devrait suffire d'ajuster RV1 pour obtenir la tension correcte sur l'entrée non-inverseuse du comparateur pour que l'aimant attaché à une figurine Lego (ou un objet léger quelconque) lévite comme dans la vidéo. Mais rien à faire : à tout coup l'aimant s'écrasait sur la bobine ou tombait sur la table.
Puis je me suis rappelé la seconde condition pour que la lévitation fonctionne. Je sentais bien que l'aimant - lorsque je le tenais entre mes doigts - était attiré par la bobine si elle était alimentée. Cela semblait aussi correct. Ou non ?
Si tout échoue, lisez le manuel, réfléchissez, ou relisez
J'ai d'abord vérifié l'intensité du champ magnétique de la bobine. J'ai été surpris de constater la faiblesse de sa force électromagnétique : alimentée directement en 5 V, elle pouvait à peine saisir le plus petit objet en fer. Il ne semble guère possible de soulever quoi que ce soit avec, et on voit encore moins comment elle pourrait faire flotter une charge relativement lourde comme un aimant auquel on aurait attaché un objet. Mais j'ai oublié quelque chose de très important : lorsque la bobine n'est pas alimentée, il existe déjà une force magnétique statique entre l'aimant permanent de la charge et le noyau métallique de la bobine. Cette dernière est bien plus forte que la force électromagnétique de la bobine. C'était donc ça l'astuce : quand l'aimant permanent s'approche du noyau, il y a un point où la force statique n'est tout simplement pas assez forte pour tirer l'aimant vers le noyau. Et là, le champ électromagnétique supplémentaire entre en jeu : la bobine n'ajoute qu'une petite force au champ statique, juste assez pour tirer l'aimant vers le haut. Le champ magnétique mesuré par le capteur à effet Hall augmente (et donc sa tension de sortie) à mesure que l'aimant se rapproche du noyau, et la bobine s'éteint (avec un réglage correct de RV1) bien avant que l'aimant n'atteigne le noyau. La gravité reprend le dessus et l'aimant repart vers le bas, le champ mesuré par le capteur baisse, ce qui réactive la bobine, etc.
Le champ électromagnétique étant bien plus faible que le champ magnétique statique, il est difficile de mesurer si la bobine alimentée attire ou repousse l'aimant. J'ai utilisé une bonne vieille boussole pour voir si l'orientation du champ électromagnétique était correcte pour remplir la 2ème condition de lévitation. En relisant la documentation de Peter, j'ai vu qu'il indiquait une solution simple pour trouver la bonne orientation de la bobine : La tension de sortie du capteur doit augmenter si l'aimant se rapproche. Elle doit aussi augmenter quand on alimente la bobine (par ex. en reliant le collecteur de Q1 à GND). Il faudra peut-être intervertir les connexions de la bobine et de la LED D3 pour y arriver.
Réglage
Comme indiqué ci-dessus, il faut de la précision et de la dextérité pour trouver le point d'équilibre de la charge. Il est quelque part entre 10 et 15 mm de distance entre la bobine et la charge. Peter décrit une procédure utilisant une pile de Post-It pour obtenir la bonne distance pour l'étalonnage, mais sans doute par manque de précision et de dextérité, cela n'a pas fonctionné pour moi. Mon astuce fut de poser l'aimant sur ma main, et de le soulever très lentement vers la bobine jusqu'à sentir la force magnétique l'attirer. Si la bobine s'éteint avant d'atteindre ce point, régler RV1 pour un seuil plus élevé sur l'entrée non-inverseuse du comparateur, ou à un niveau plus bas si elle ne s'éteint pas avant que l'aimant ne soit tiré vers le noyau. La LED blanche s'allume brièvement lorsque la bobine s'éteint, régler le potentiomètre jusqu'à ce que cette LED semble allumée en continu (en réalité elle clignote à la fréquence de commande de l'aimant). Au début, on se retrouve avec l'aimant collé au noyau, mais une fois le coup de main pris, il devient de plus en plus facile d'obtenir un bon calibrage pour d'autres charges. Avec ma réalisation, je pouvais même entendre la commutation du circuit d'asservissement avec le réglage (presque) correct. Et oui : y parvenir peut prendre du temps, mais vous réussirez !
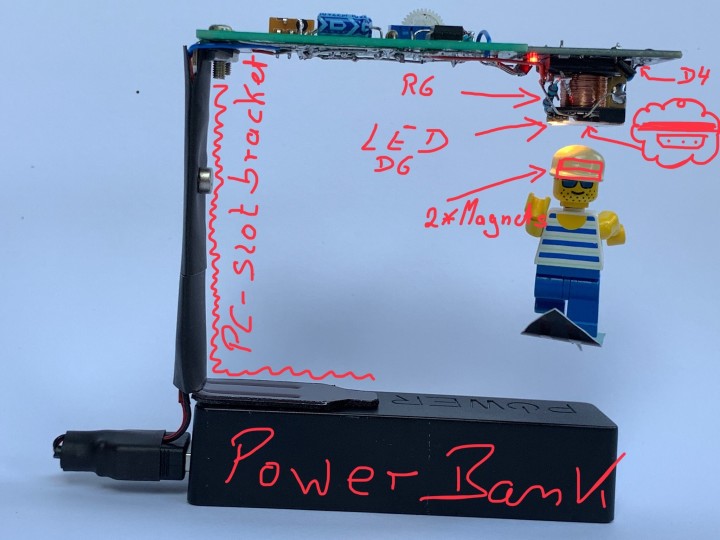
Ma première intention était de construire un prototype au moins aussi joli que celui de l'auteur, mais avec toutes les modifications que j'ai dû apporter pour que ça marche, j'ai totalement échoué à cet égard : voyez la fig. 5.
Mais mon objectif principal était atteint : J'ai réussi à faire de la lévitation magnétique ! Et peut-être qu'un jour, quand je ne saurai plus quoi faire de mon temps libre ... Mais je ferai plus d'efforts sur l'esthétique de la future seconde partie, avec l'autre projet de lévitation conçu par Peter Neufeld, la solution numérique. Cette simple installation analogique servira de leçon pour éviter la plupart des pièges rencontrés et le second projet devrait être plus facile à réaliser, laissant plus de temps pour soigner l'esthétique du matériel !
Contributeurs
Conception : Peter NeufeldTexte et édition : Luc Lemmens
Illustrations : Peter Neufeld, Patrick Wielders, Luc Lemmens
Mise en page : Giel Dols, Harmen Heida
Discussion (0 commentaire(s))