
commande universelle de triacs avec ATmega
sur
Tout électronicien a une idée de ce que sont un thyristor et un triac, comment ils fonctionnent et où les utiliser. En fait, leurs possibilités sont si variées qu’elles ne sont jamais pleinement exploitées que par des spécialistes. Cet article se cantonne aux triacs, car les thyristors ne sont plus utilisés désormais que dans des cas particuliers.
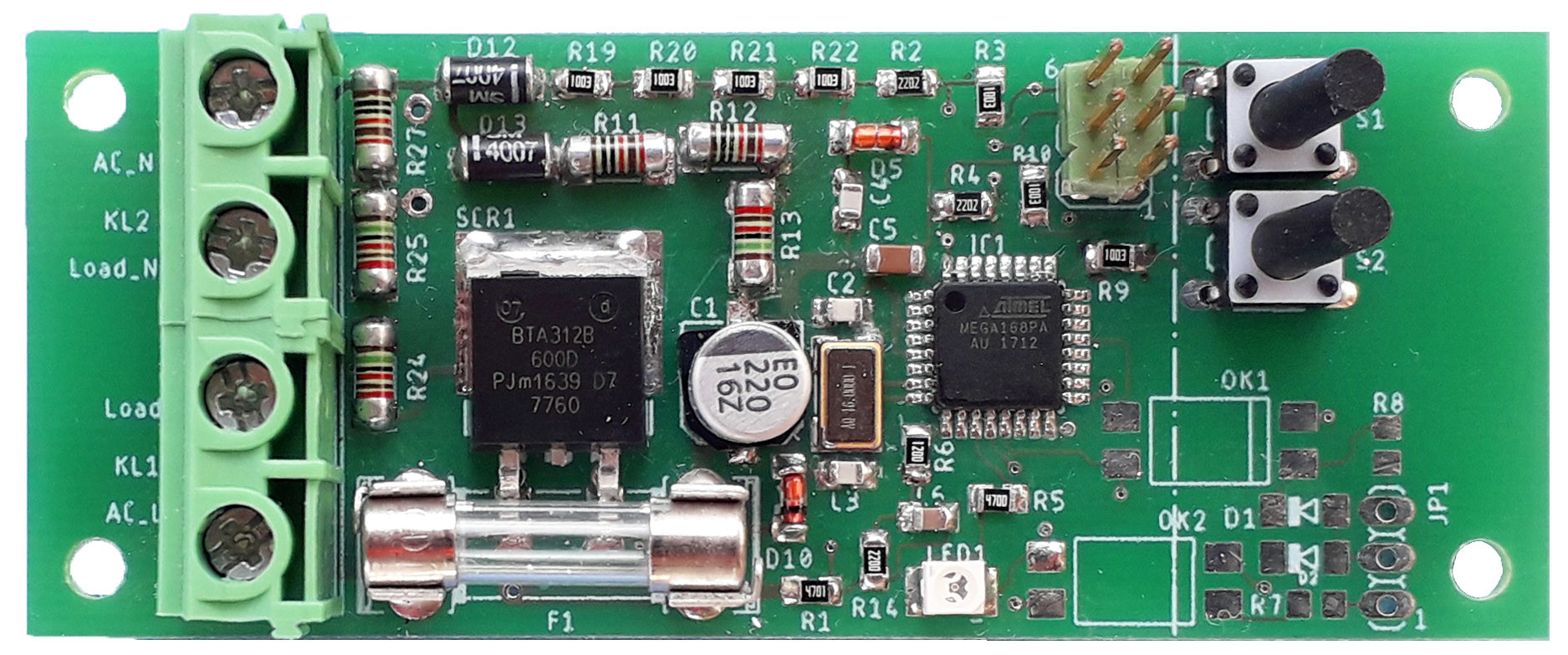
Nous commencerons par la fonction de base d'un triac et ses paramètres pertinents, puis passerons à l'électronique du module de commande. La figure 1 montre le prototype fini. Le couple ATmega - triac permet de réaliser de nombreuses fonctions : selon le microprogramme, le module peut être utilisé comme simple interrupteur (à distance), minuterie, gradateur ou module de démarrage progressif pour charges inductives (transformateurs ou moteurs).
L'essentiel
Un triac est un interrupteur à semi-conducteur bidirectionnel. C’est donc bien un interrupteur pour courant alternatif. Le courant (de charge) circule par les deux électrodes T1 et T2 (c’est le T de terminal). Ces électrodes sont parfois désignées MT1/MT2 (de main terminal) ou anciennement A1 et A2 (anode). La gâchette G est l’électrode de commande. La fig. 2 donne le symbole du triac tel qu’il est dessiné dans les schémas d’Elektor (à gauche) et un circuit équivalent simple (à droite).

droite circuit équivalent composé d'un
couple PNP et NPN pour le premier quadrant.
Le triac ne conduit pas en l’absence d'un courant de gâchette insuffisant entre G et T1. Une fois le triac amorcé, il conduit tant que l’intensité du courant entre T1 et T2 ne passe pas sous un certain seuil qui dépend du type de triac. En dessous de ce seuil de courant, le triac ne conduit plus. Sous une tension alternative, s'il n'est pas commandé en permanence par sa gâchette, la conduction du triac est donc coupée à chaque passage par zéro du courant (lequel courant n'est pas nécessairement en phase avec la tension). Le triac peut donc être amorcé par une courte impulsion de gâchette de faible intensité, mais on ne peut pas en forcer le blocage instantanément.
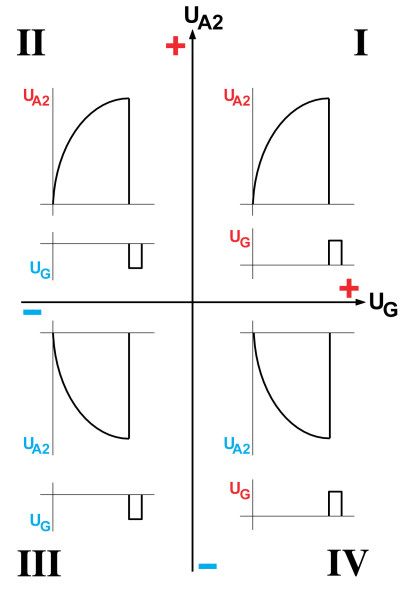
T1 est le point ou potentiel de référence pour la gâchette G. Selon la polarité du potentiel de la gâchette et de T2 par rapport à T1, il y a quatre flux de courant possibles, illustrés par le modèle à quatre quadrants (fig. 3).
tensions sur la gâchette ou sur T2 par rapport à T1.
L'axe des X représente la polarité de la tension de gâchette par rapport à T1. L'axe des Y représente la polarité de la tension sur T2 par rapport à T1. Les quatre quadrants qui en résultent sont marqués de chiffres romains. Les valeurs positives sont indiquées en rouge et les valeurs négatives en bleu. Dans sa fiche technique, les paramètres d'un triac sont indiqués pour chacun des quatre quadrants, car ils sont souvent différents.
Paramètres
Pour amorcer ou ouvrir le triac, la valeur de seuil de l'IGT (courant d’amorçage de la gâchette) doit être dépassée. Après la fin de l'impulsion de commande, le triac ne reste conducteur que si le courant de charge est supérieur à IL (Latching Current = c. de verrouillage). S'il est plus faible, le triac se verrouille après la fin de l'impulsion d’amorçage. Dans les fiches techniques, la spécification des courants d’amorçage et des autres courants est donnée séparément pour chaque quadrant. Si le courant de charge à travers le triac une fois amorcé tombe en dessous du courant de maintien IH, le triac se bloque.
Avec les charges inductives, il y a entre courant et tension un déphasage qui dépend de la composante inductive. Par conséquent, la tension aux bornes de la charge lors du passage par zéro du courant n'est pas nécessairement nulle. C'est pourquoi, lors du blocage du triac, la tension sur T2 peut sauter brusquement à des valeurs élevées, ce qui pourrait causer des problèmes : si le saut de tension est supérieur à la valeur limite dVCOM/dt, le triac redevient conducteur. Selon la charge, cela peut avoir un effet destructeur. On amortit cette montée en tension trop rapide au moyen d’un réseau RC (dit snubber) en parallèle sur T2 et T1. Les triacs dits Hi-Com sont beaucoup moins sensibles à cet égard.
Il faut considérer aussi le paramètre dVD/dt. Si cette valeur limite est dépassée sur le triac bloqué, celui-ci devient conducteur. Si le courant de suivi dure une demi-onde, un transformateur mis sous tension de cette manière peut entrer en saturation et présenter brusquement une faible impédance. Le triac et éventuellement les pistes du circuit imprimé ne survivent généralement pas à ce genre de traitements. Un amortisseur ou un triac Hi-Com sont de bons remèdes dans ce cas.
Le paramètre dIT/dt, ou valeur limite du taux maximal d'augmentation du courant après le déclenchement du triac, est également essentiel. Un dépassement entraîne la destruction du triac avec un court-circuit entre T2 et T1. La raison en est la densité de courant non homogène autour de l'électrode de grille, qui entraîne une surchauffe locale. Comme la valeur de dIT/dt est faible, en particulier dans le 4e quadrant, ce mode de fonctionnement doit être évité. Le problème du dIT/dt reste mineur lors de la commutation au passage par zéro de la tension – mais seulement pour les charges à prédominance résistive. Si nécessaire, le taux d'augmentation du courant peut également être limité en connectant une petite self à air en amont.
Le paramètre dICOM/dt définit la valeur limite du taux de montée du courant au passage par zéro actuel. Si cette valeur est dépassée, le triac ne se bloque pas mais reste conducteur.
Le triac est mal amorcé si la tension inverse maximale périodique VDRM (Repetitive Peak Off-state Voltage) est dépassée. On remédie à cela avec en parallèle sur T2/T1, une varistance qui limite la tension maximale.
Le dernier paramètre à expliquer est l'intégrale de la charge limite I²t ou l'intégrale du courant au carré sur 10 ms. Cette valeur limite correspond à l'absorption maximale d'énergie du triac. Elle doit être prise en compte pour dimensionner la sécurisation.
Les autres grandeurs de la fiche technique d’un triac devraient en grande partie s'expliquer d'elles-mêmes. Si vous souhaitez concevoir vous-même des circuits à triacs, vous devriez maintenant pouvoir sélectionner le triac idéal pour votre application en fonction des paramètres.
Module de commande du triac
Passons à la pratique. Grâce à son intelligence, notre module de commande universel pour triacs pourra remplir de nombreuses fonctions : simple interrupteur, temporisateur avec arrêt temporisé, gradateur ou commande de charges inductives : il sait tout faire ! Ici microcontrôleur et intelligence vont de pair. Le choix s'est porté sur un ATmega.
Pour choisir le bon triac, les principaux critères sont le courant à commuter et la tension maximale appliquée au triac. Pour un fonctionnement sur réseau monophasé, on peut se contenter de 230 V x √2 + réserve ≈ 600 V. Pour un usage industriel, il est préférable de choisir des triacs à tension inverse de 800 V en raison des transitoires élevés qui se produisent. Le courant réel possible dépend non seulement de la valeur nominale du triac, mais aussi de la puissance dissipée et donc du refroidissement. Cette puissance est le produit de la tension directe par le courant commuté.
Il faut également tenir compte du courant de charge minimal. Les seuils IH et IL doivent être dépassés franchement, sinon la charge ne sera pas correctement mise en marche ou le flux de courant ne sera pas continu. Les types BT134-600E (4 A) et BTA312B (12 A) de 600 V sont universels et conviennent à de nombreux usages simples.
Alimentation
L’alimentation d’un tel module n'a rien d’anodin. Une petite alimentation à découpage serait bienvenue, mais elle serait trop encombrante. Une résistance capacitive en série serait plus simple, mais les condensateurs MKT avec une capacité et une rigidité diélectrique convenables ne sont pas bon marché. Une résistance ohmique en série serait encore plus simple. Le triac doit être exploité dans les quadrants II et III. Il faut donc une tension de déclenchement de grille négative par rapport à l'électrode T1 directement connectée au secteur. Le moyen le plus simple de l’obtenir est le redressement simple alternance. La praticabilité d’un tel circuit dépend toutefois directement de sa consommation de courant.
Il faut donc compter le courant du microcontrôleur lui-même et l'énergie d'amorçage du triac. Le µC a très peu à faire et peut donc roupiller la plupart du temps, de sorte qu’il ne consomme pas grand-chose. Les impulsions d’amorçage sont courtes, l'énergie moyenne reste faible. Jusqu’à quel point est-il possible de réduire la consommation. Le µC est en veille prolongée la plupart du temps et ne se réveille que pour produire l'impulsion d'amorçage.
La situation la plus défavorable est celle du déclenchement intempestif par un parasite RF sans détection de passage par zéro, avec un signal de déclenchement produit toutes les 278 µs. Sous une tension VCC = 4,7 V, un ATmega a besoin de 1,9 mA. Avec un courant de gâchette de crête de 11 mA pendant 10 µs chacun à une période de 278 µs = 3,6 kHz, le courant de gâchette moyen est de 400 µA. Un total d'environ 2,3 mA circule alors. Cela détermine la valeur de la résistance en série et sa dissipation de puissance. Pour le redressement simple alternance, la valeur effective est Ipk / 2 et la valeur moyenne est Ipk / π. Il en découle :
Ipk = 2,3 mA x π = 7,3 mA,
R = 325 V / 7,3 mA = 45 kΩ,
Ieff = Ipk / 2 = 3,7 mA
et enfin une dissipation de puissance à la résistance R de :
Pvv = Ieff² x R = (3,7 mA)² x 45 kΩ = 0,62 W.
Si R est réparti en trois résistances individuelles de 1 W, ni la dissipation ni la tension ne posent pas de problème.
Un problème supplémentaire se pose lors de la mise en marche. Tant que le µC est en cours d’initialisation, il lui faut beaucoup de courant, et la tension Vcc n'augmente que très lentement. Ce problème peut être résolu en réglant le niveau de DBO à 2,7 V et en activant immédiatement le mode veille pendant 250 ms. Nous y reviendrons.
Sécurité
Les dangers d'un module relié directement au réseau électrique sont à prendre au sérieux. Quand le circuit est sur le secteur, aucun instrument de mesure et certainement aucun PC ne doit jamais y être connecté. De telles manipulations ne doivent jamais être faites que par un électricien habilité. La présence d’un transfo de séparation galvanique est obligatoire. Il faut aussi vous prémunir contre tout contact accidentel lorsque le module est branché sur le secteur. Il sera donc forcément installé dans un boîtier parfaitement isolant !
Avant tout test ou modification, le module doit être débranché du secteur et alimenté sous 5 V par un bloc d'alimentation. Un signal de 50 Hz d’une amplitude de 4 V issu d'un générateur de signaux carrés sera nécessaire sur C4 pour la détection du passage par zéro.
Matériel
L'alimentation du µC (fig. 4) et de ses périphériques passe par les résistances de limitation R11 à R13 et le redressement monoalternance par D13 ainsi que le lissage par C1. Les résistances MELF (metal electrode leadless face) R11 à R13 offrent une rigidité diélectrique et une capacité de charge élevées. Du fait de l’impédance élevée de l’alimentation, celle-ci se comporte en source de courant, et la zener D10 fait bien l’affaire comme source de tension constante.
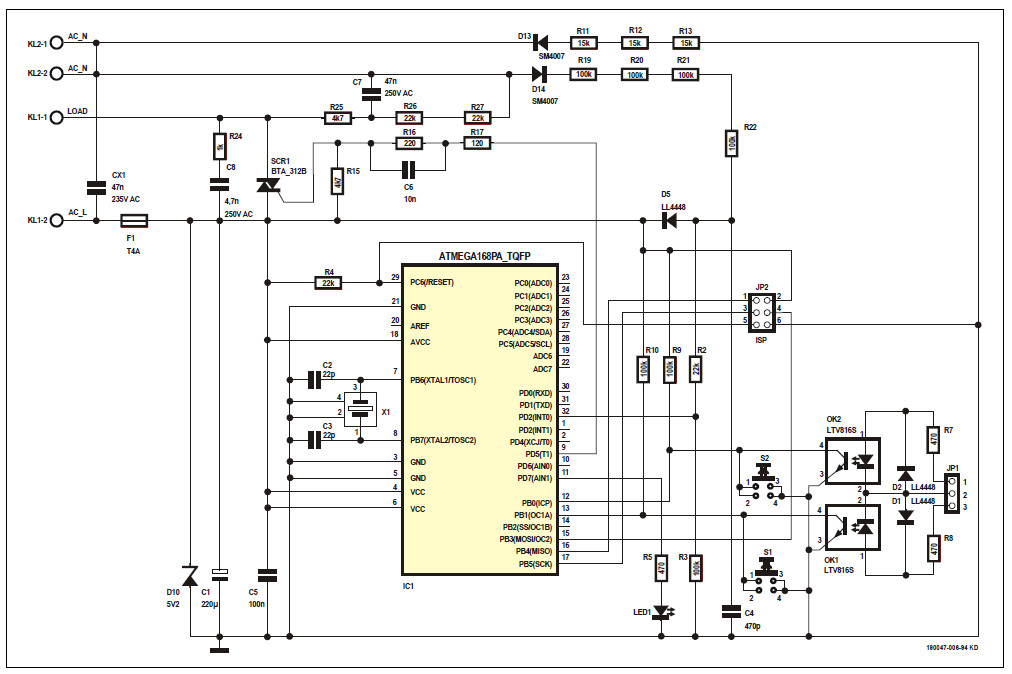
Le quartz X1 cadence le µC avec précision ce qui assure une chronologie rigoureuse des impulsions de déclenchement. D12 associée au diviseur de tension de R2, R3 et R19 à R22 délivre un signal adapté à la détection du passage par zéro, et « raccroché » au potentiel VCC par D5.
R16 et R17 limitent le courant de gâchette. C6 en parallèle sur R16 assure un déclenchement rapide du triac. En parallèle sur T2 et T1 du triac, on trouve l'amortisseur fait de R24 et C8, qui empêche les amorçages intempestifs. Le triac utilisé est de type Hi-Com, ce qui permet d’associer un condensateur de faible capacité à une résistance assez forte.
Une particularité de ce circuit est la charge auxiliaire optionnelle composée de R25 à R27 et C7. Elle n'est nécessaire que si la charge proprement dite présente une inductance élevée, comme c'est le cas d’un transfo. La plupart du temps, ces composants ne sont pas implantés. Le condensateur X CX1 supprime les interférences.
Le module est commandé par les boutons S1 et S2. Il est possible d'utiliser les optocoupleurs OK connectés en parallèle. Pour respecter les distances de sécurité, utilisez des boutons poussoirs d’un modèle approprié à ces conditions. La LED1 sert de témoin de fonctionnement. IC1 est programmé via l'interface ISP (JP2). F1 protège le module en cas de court-circuit.
Logiciel
Le logiciel (cf. pièce jointe à la fin de l'article) a été créé avec l'IDE Arduino. En raison de la lenteur des fonctions d'Arduino, l'auteur ne les a pas utilisées. Le programme est très rapide et fonctionne de manière déterministe. C'est pourquoi les sketches n'ont délibérément pas été portées dans Atmel Studio.
Malheureusement, la programmation du µC n’est pas possible via le chargeur de démarrage (bootloader), car à la mise en marche la consommation de courant serait si forte que la tension d'alimentation nominale ne serait pas atteinte. Les fusibles du µC doivent donc être réglés de façon à inactiver le chargeur de démarrage. La programmation se fait directement depuis Atmel Studio par un programmeur ISP approprié.
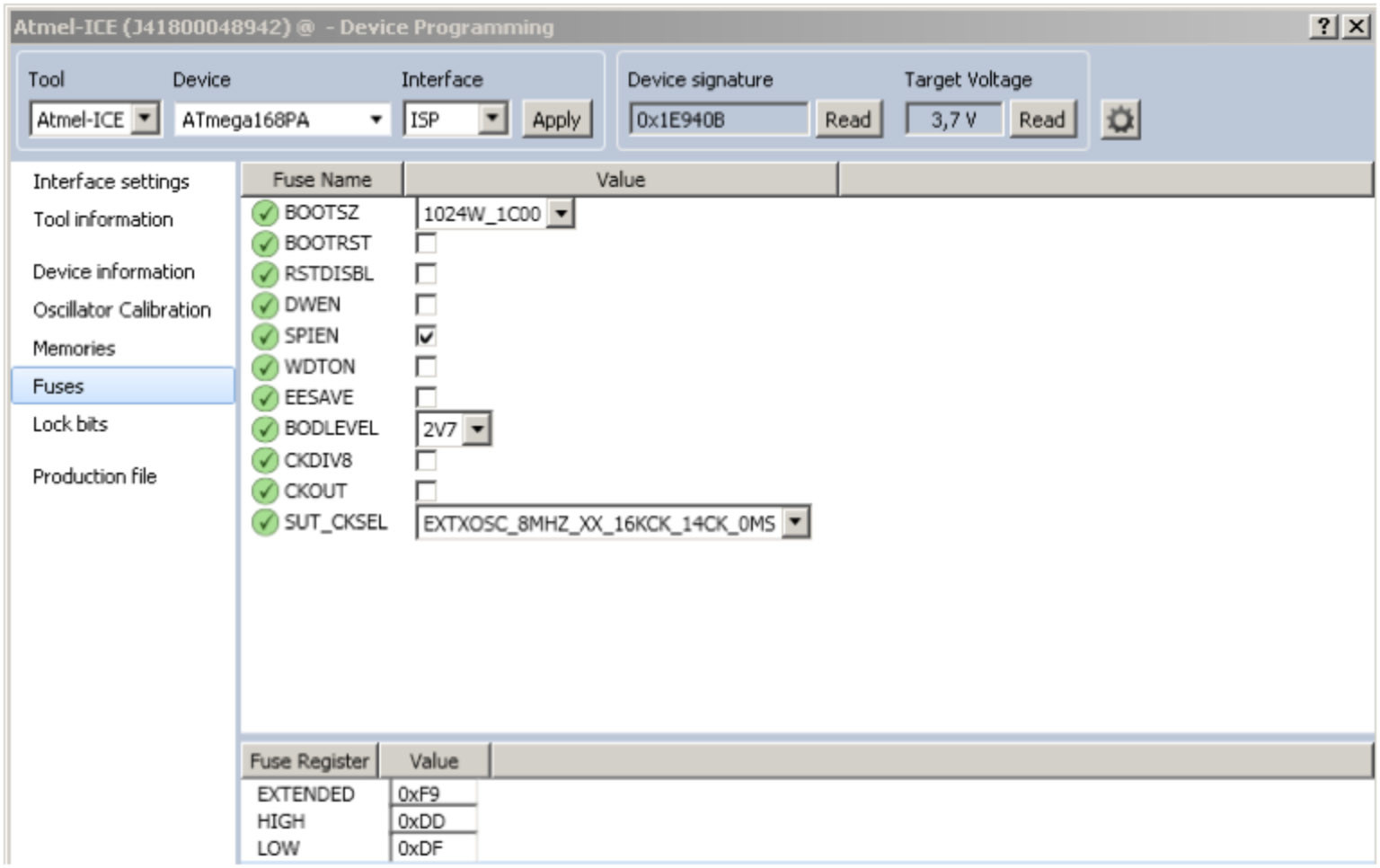
Dans le répertoire du projet, vous trouverez le fichier HEX pour chaque application en plus du croquis correspondant. Lors de la première programmation, il faut que les fusibles soient programmés comme indiqué (fig 5).
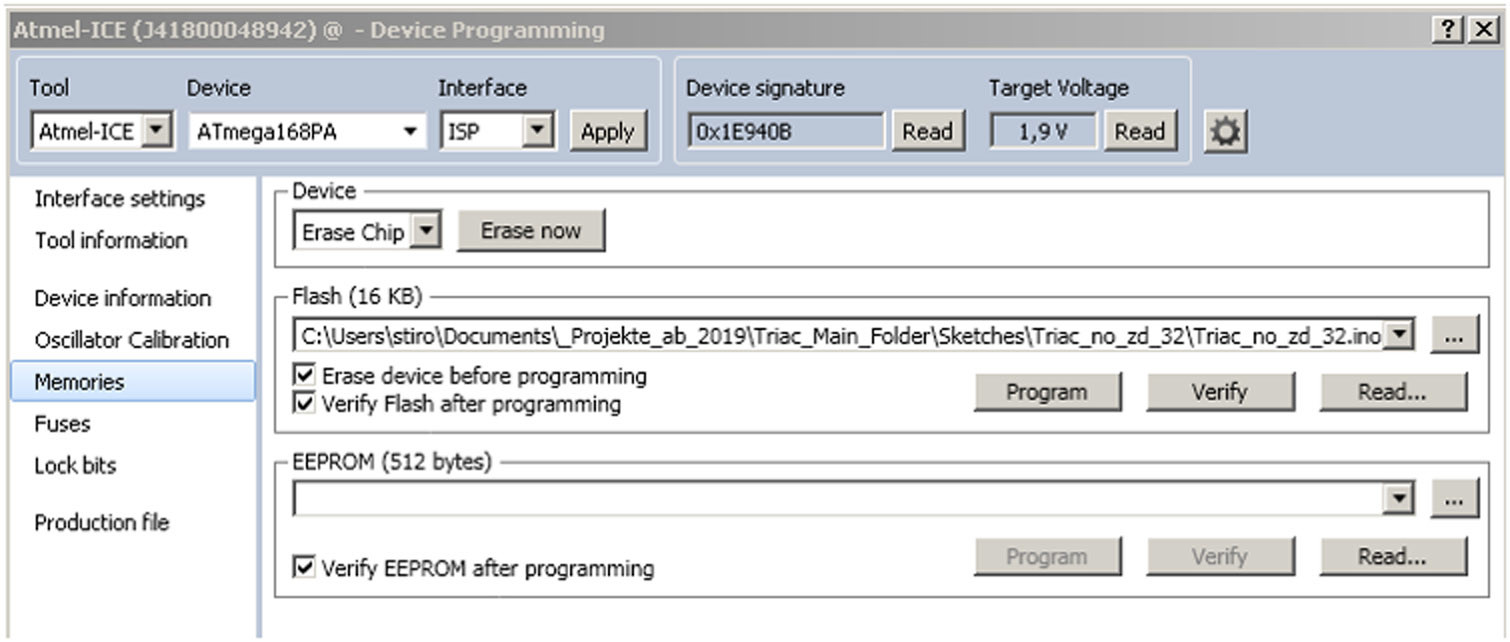
Puis on charge le fichier HEX souhaité à partir du répertoire du projet et on le programme dans le µC (fig. 6).
Après avoir modifié un croquis, il faut le recompiler (Vérifier/Compiler). L’indicateur d'état (status) de l'IDE indique le répertoire du fichier HEX produit. Un chemin de fichier typique serait :
C:\Users\name\AppData\Local\Temp\buildxyz.tmp/Triac_...ino.hex
Comme le répertoire et le numéro de build sont réaffectés quotidiennement, le fichier doit également être mis à jour quotidiennement dans Atmel Studio. Si le répertoire AppData n'est pas visible dans l'explorateur/gestionnaire de fichiers, la fonction "Afficher tous les fichiers et dossiers" doit être définie dans l'explorateur sous Outils/Options de dossier/Vue.
Dans Atmel Studio, vous chargez le fichier HEX souhaité et vous programmez l'ATmega.
Attention : lors de la programmation, le module doit être complètement déconnecté du secteur et alimenté en toute sécurité électrique par une source basse tension.
Applications
La procédure de démarrage est la même pour toutes les apps. À la mise sous tension, c’est le niveau BOD de 2,7 V qui détermine la fin de la réinitialisation. Après le démarrage du programme, la minuterie (WatchDogTimer) est activée et le programme est mis en mode veille. Cela permet à VCC de s’établir rapidement et en toute sécurité (fig. 7). L'expiration de la minuterie déclenche l'interruption WDT qui met fin au mode veille. Ensuite commence l'exécution du programme proprement dit.
X2 : fin de minuterie WDT, réveil.
L'extrait du sketch (listage 1) montre comment configurer le minuteur et le mode veille. Le listage contient une partie du code de la procédure de démarrage. Tout d'abord, le chien de garde est réglé et activé. Ensuite, le µC est mis en mode de veille. L'expiration du WDT déclenche l'interruption du WDT, qui réveille à nouveau le µC.

Un croquis distinct est disponible pour chaque exemple de demande. Chaque application a des fonctions différentes que l’on peut sélectionner par des boutons ou des cavaliers. De plus amples informations figurent dans les commentaires de ces sketches.
Interrupteur et minuterie
L'application Sketch Triac_no_zd_32 ne nécessite pas de détection du passage par zéro, elle montre la programmation de base du module et ses particularités. Le circuit fonctionne sur une alimentation électrique de 5 V pour la programmation et les tests. Si vous vous intéressez à la programmation matérielle de la minuterie WD, aux différents modes de veille, aux interruptions, aux fonctions de la minuterie ou aux commandes d'E/S, plongez dans le code disponible ci-dessous avec tous les exemples (cf. pièce jointe à la fin de l'article).
Le choix de la fonction (interrupteur ou minuterie) est fait au moyen d'un bouton. Avec le mode de fonctionnement Autostart, la minuterie démarre immédiatement après la mise en marche puis coupe la charge après expiration. Cette fonction convient pour limiter la durée d'éclairage d'une lampe. L'heure d'extinction est enregistrée dans le programme.
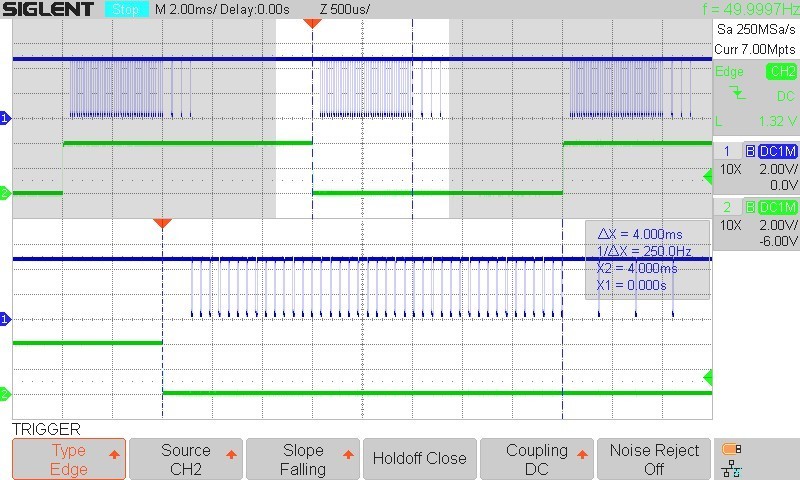
Le programme délivre des impulsions d’amorçage du triac d’une durée de 10 µs, séparées par des intervalles de 278 µs. Comme ces impulsions ne sont pas liées à la fréquence du secteur, la commutation est asynchrone par rapport aux alternances. Dans le pire des cas, la charge n'est activée que 278 µs après le passage par zéro. À cet instant, la tension du réseau sera déjà de 29 V, ce qui se traduit par des pics de tension problématiques pour la CEM. L'oscillogramme (fig. 8) montre la séquence des événements durant 1 s. Les impulsions d’amorçage se déplacent sans corrélation avec le passage par zéro. Selon le délai entre impulsions de déclenchement et passage par zéro, la tension aux bornes du triac n’est pas la même.
Dans la prochaine application, avec détection du passage par zéro, l’amorçage du triac sera synchrone. Contrairement aux mesures suivantes, c’est VCC qui est ici le potentiel de référence. Comme le potentiel de T1 du triac est celui de VCC, la polarité des impulsions d’amorçage de la gâchette est négative.
Interrupteur et minuterie synchrones
Cette fois c’est un signal synchrone avec les alternances qui signale les passages par zéro. Appliqué à l'entrée INT0, le front descendant de ce signal déclenche une interruption et marque ainsi le début de la première demi-onde. La fin de cette demi-onde et le début de la demi-onde suivante sont déterminés par Timer2, pour faire l'économie d’une détection plus complexe du deuxième passage par zéro.
Pour un amorçage sûr, même en présence d’un courant de charge faible, la première impulsion de déclenchement de chaque demi-onde dure 280 µs. Elle est suivie d'impulsions de déclenchement de 10 µs supplémentaires. Cela garantit que le seuil d'intensité IL du triac sera dépassé même en présence de charges à haute impédance (fig. 9). On remarque les pics de tension (environ 3 V) aux bornes du triac à la fin de chaque demi-onde. C’est parce que, à la fin de la demi-onde, le faible courant de la lampe à LED connectée pour ces essais tombe en dessous de IH. Ceci ne cause pas de perturbations notables.
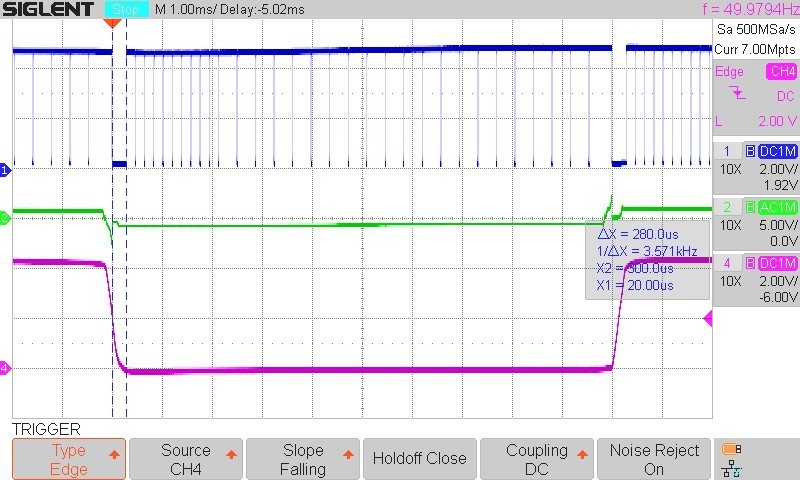
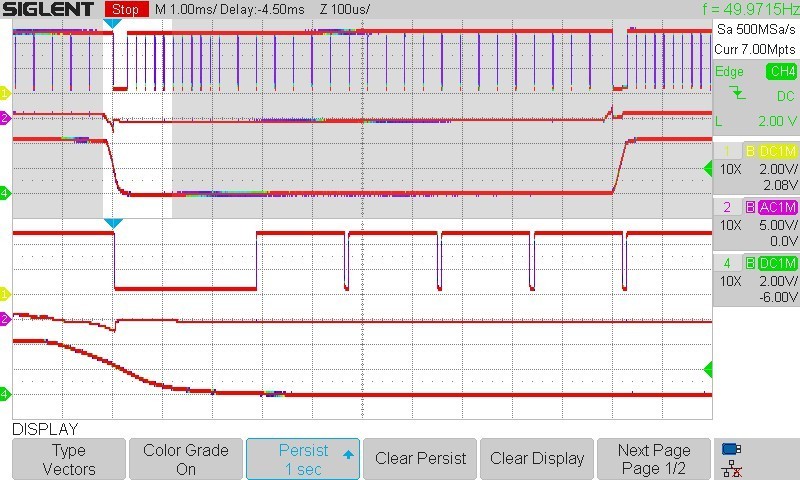
La superposition des courbes durant 1 s sur la fig. 10 montre la synchronisation des impulsions d’amorçage avec la tension du réseau.
Gradateur
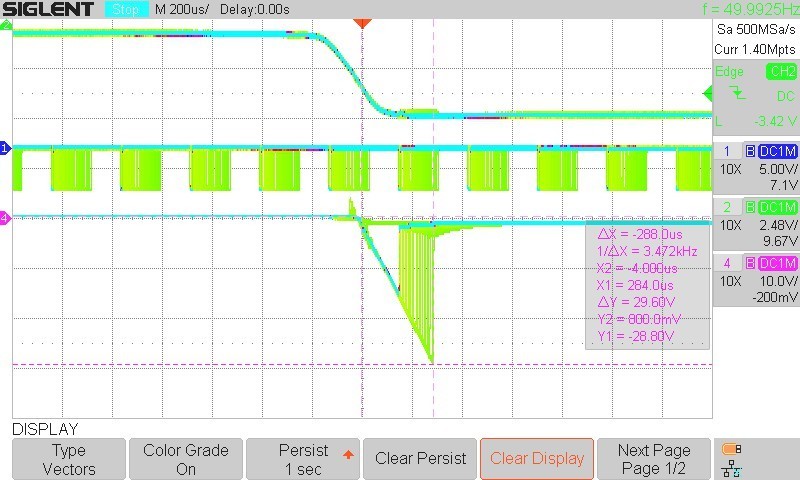
L’application par excellence du triac est le gradateur d’intensité lumineuse par découpage de l'angle de phase. La durée de mise sous tension de la charge varie par rapport au passage par zéro de chaque demi-onde du secteur (≈ angle de phase). Les gradateurs peuvent causer des problèmes de CEM considérables, car des flancs abrupts et élevés se produisent en fonction de l'angle de découpage de phase. Dans le cas le plus défavorable, l’amorçage a lieu quand la tension du secteur atteint sa valeur de crête (angle de phase = 90°). Lors de l'amorçage du triac, la tension à ses bornes chute rapidement de sa valeur maximale à zéro (fig. 11). Selon la nature de la charge, cela peut se traduire par des courants très élevés et donc des niveaux de bruit élevés. Un filtre CEM en amont (récupéré p. ex. sur un ancien gradateur HS) est donc indispensable.
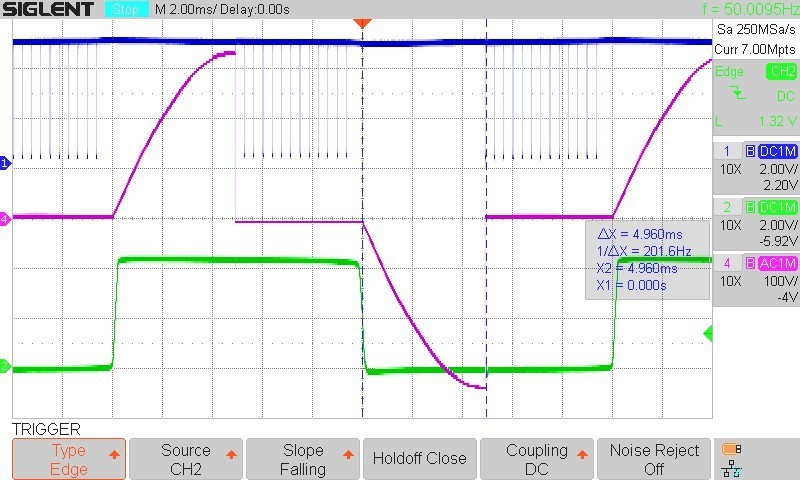
CH2 (vert) : signal de passage par zéro ; CH4 (rouge) : tension aux bornes du triac.
De nombreuses lampes à LED ne fonctionnent pas avec les variateurs conventionnels en raison de leur mode d'alimentation. C’est aussi le cas avec ce module qu’il faudra donc utiliser avec des luminaires à LED qui acceptent les gradateurs.
Ce qui est intéressant ici, c'est qu'après l’impulsion initiale d’amorçage, d'autres impulsions sont produites jusqu'à la fin de la demi-onde, ce qui permet d'utiliser des charges plus complexes. À pleine puissance, la première impulsion après le passage par zéro dure 190 µs pour être sûr que le seuil d'intensité IH est dépassé sans risque, même avec des charges à haute impédance.
La puissance de sortie est réglée à l'aide des deux boutons ou au moyen d’un optocoupleur.
Charges inductives : amorçage en douceur
La mise sous tension des charges inductives, en particulier des transfos, donne lieu à un appel de courant de forte intensité. Le passage par zéro de la tension est le moment le plus critique. Le magnétisme résiduel du noyau peut également poser des problèmes, car il entraîne une asymétrie du courant d'appel par rapport à la ligne du zéro. La courbe B de la boucle ou du cycle d'hystérésis du noyau est décalé dans une direction et atteint ainsi facilement la zone de saturation. Ensuite, l’enroulement perd soudainement son inductance et le courant dont l’intensité continue d’augmenter n'est presque plus limité que par la (faible) résistance du fil, etc. Dans cette situation, les transfos toriques sont mal lotis. C'est pourquoi il faut augmenter la marge de précaution bien au-delà de l’intensité nominale du courant de charge.
Parfois, on limite le courant d'appel par une thermistance ou une résistance en série avec relais temporisateur, jusqu'à ce qu'un champ magnétique symétrique et donc un courant alternatif propre soient établis. Théoriquement, ce problème peut également être résolu par une croissance lente du courant d'appel par déphasage de l’angle d’amorçage. On amorce le transfo avec un angle de phase d'environ 180° que l’on réduit lentement jusqu'à 0°. C'est ce qui est fait dans cette application.
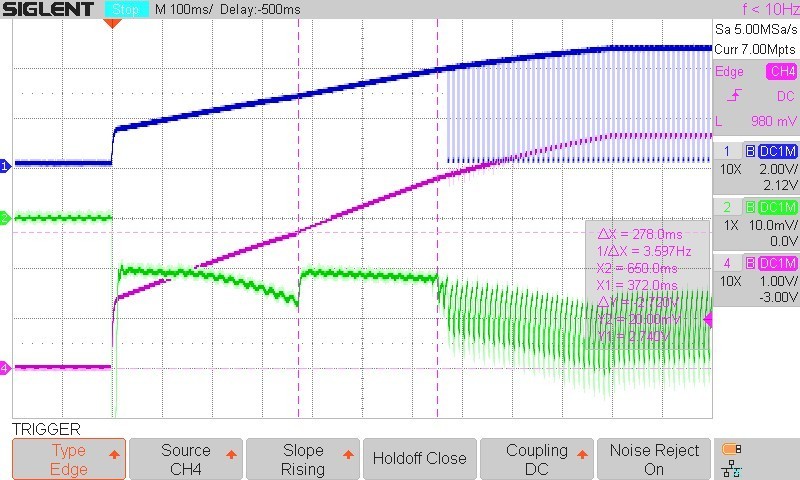
La figure 12 montre la séquence d'impulsions après redémarrage. La première impulsion d’amorçage intervient environ 8,6 ms après le passage par zéro. Après chaque alternance complète, une impulsion supplémentaire est ajoutée avant, jusqu'à ce que le temps soit réduit à environ 0,3 ms.
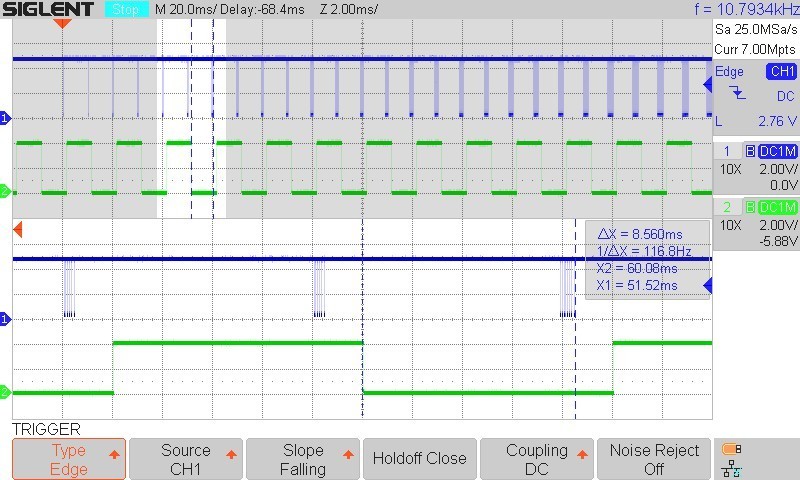
CH2 (vert) : signal de passage par zéro.
La zone agrandie ci-dessous montre l'augmentation de 5 à 7 impulsions.
La figure 13 montre l'état d'équilibre. Au cours des trois premières ms, le courant de charge passe par zéro en raison du déphasage. Pour obtenir un flux de courant continu, les impulsions de commande doivent être rapprochées durant cet intervalle.
CH1 (bleu) : impulsions de gâchette ; CH2 (vert) : signal de passage par zéro.
Des impulsions de remplissage sont produites pendant 5 ms après chaque passage par zéro.
La figure 14 montre le courant du transfo à vide. Le signal de passage par zéro indique la référence à la tension du secteur. Vous pouvez voir le courant induit, qui atteint son intensité maximum lors du passage par zéro de la tension. L'autre part résulte des pertes dans le fer et le cuivre du transfo. Le fait que le courant ne soit pas déphasé exactement de 90° est dû aux pertes et aux défauts de linéarité du noyau. La figure 15 montre le courant du transfo sous charge. Le courant de charge et le courant induit sont superposés. La charge réduit le déphasage.
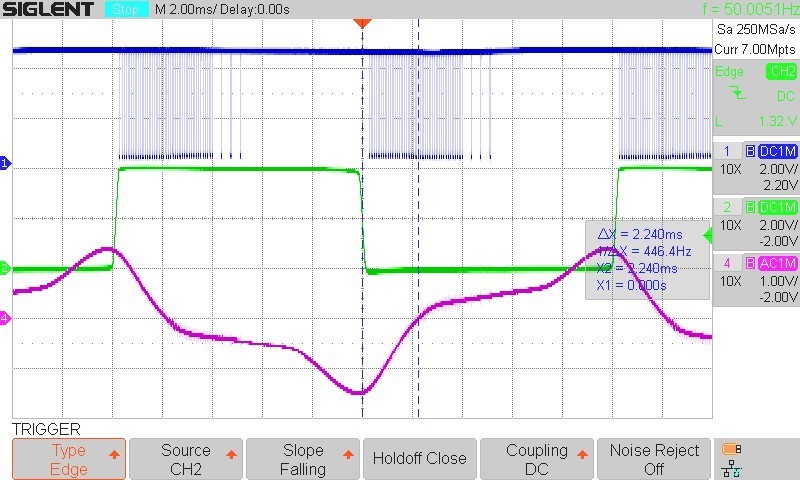
CH2 (vert) : signal de passage par zéro ; CH4 (rouge) : courant de transfo
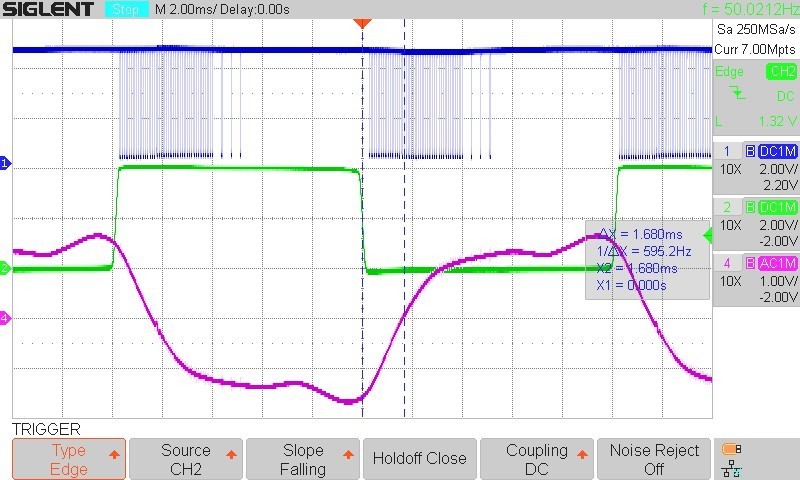
CH2 (vert) : signal de passage par zéro ; CH4 (rouge) : courant de transfo
Une condition préalable à un fonctionnement fiable est la symétrie de l’amorçage du triac. Les impulsions d'amorçage doivent être équidistantes du passage par zéro dans les deux demi-alternances, de sorte que l'angle de circulation du courant soit lui aussi symétrique. Les intensités IGT et surtout IH jouent un rôle important ici. En amplifiant le flanc montant du courant de gâchette avec le réseau RC, on assure au triac un amorçage sûr. Pour que le triac reste conducteur, le courant du transfo doit être supérieur au seuil d’intensité IH. Les transfos toriques sont problématiques en raison de leur inductance élevée. Heureusement, une petite charge résistive supplémentaire (R25 à R27, en option) suffit pour résoudre ce problème. Certains transfos toriques nécessitent même une charge externe supplémentaire.
La programmation de la commande du triac uniquement par impulsions était un défi, surtout avec les transfos. J’espère que vous en capterez les astuces grâce aux commentaires détaillés de mon code.
Amusez-vous bien avec les applications décrites ! Si vous en envisagez de nouvelles, n’hésitez pas à modifier le microprogramme comme bon vous semble. (190047 VF)
► Elektor est réputé pour la qualité de son contenu. En voulez-vous davantage ?
► Abonnez-vous maintenant au magazine Elektor et ne manquez plus jamais ni aucun de ces articles précieux ni aucun de ces projets géniaux.
Discussion (3 commentaire(s))