
Banc d’essai : SunFounder - Robot quadrupède à télécommande V2.0
sur
La boîte reçue contient toutes les pièces du robot plutôt bien emballées, et comme pour tout kit, il n'y a aucun mal à commencer par vérifier si le contenu est correct :
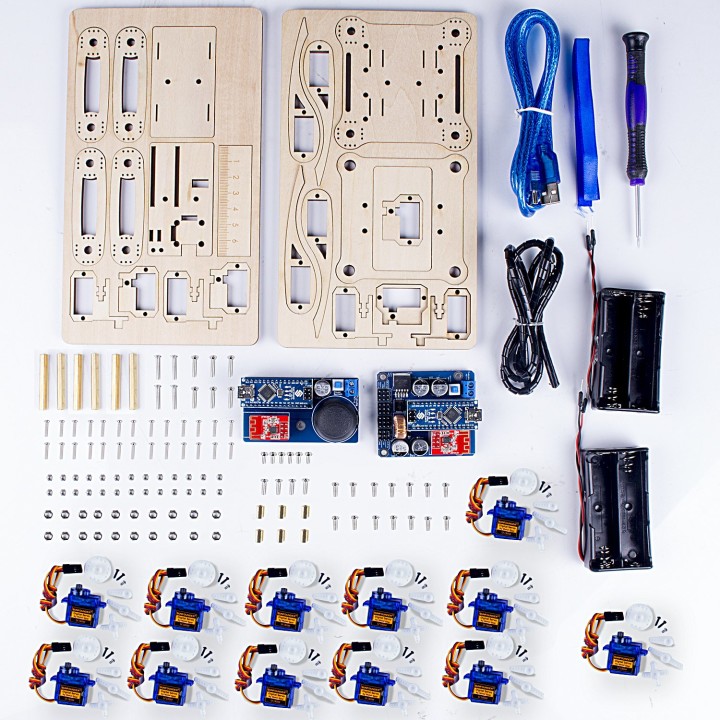
Le produit livré ne comporte ni manuel papier ni listes de pièces, mais vous aurez une petite carte indiquant un lien pour télécharger la documentation et le logiciel. Comme je n’étais pas enchanté de devoir saisir le lien complet, je me suis rendu sur le site web de SunFounder et j'ai trouvé moi-même les instructions d'assemblage. Même si il n'y a rien à redire à cette approche, je n’ai réalisé qu’à posteriori qu'une lecture attentive aurait pu m'être très utile : dans la documentation proposée, j'ai cliqué sur le premier lien qui indiquait « Quadruped », et j'ai donc obtenu le mauvais manuel... La liste des pièces ne correspondait pas (cela aurait dû me mettre la puce à l'oreille) et malgré cela, j'ai commencé à construire le robot pour réaliser finalement que ça n'allait pas marcher. Bien sûr, ma première réaction a été de mettre en cause le constructeur, mais pour découvrir ensuite, avec une petite dose d'humilité, que le nom du kit portait le suffixe « V2.0 ». Ce n’était probablement pas pour rien... En consultant les documentations proposées jusqu'au bout, vous pouvez effectivement accéder au bon manuel avec la bonne liste de pièces. À une nuance près : il est tout de même question de « plaques en acrylique » alors que le squelette contenu dans ce kit est constitué de pièces en bois.
Les batteries nécessaires pour le robot ne sont pas livrées dans la boîte et sont juste un petit peu plus grandes qu'un modèle AA : il s'agit de batteries Li-ion 3,7 V type 18650, qui ne sont pas nécessairement à la disposition de tous de manière courante. Néanmoins, le choix des développeurs est approprié, car ces batteries et leur chargeur associé ne sont pas très coûteux et assez faciles à trouver. Du fait du haut niveau de tension de chaque accumulateur, elles sont moins encombrantes qu'un ensemble comparable NiCd ou NiMH. Quoiqu'il en soit, il vous faudra obtenir ces accumulateurs pour faire fonctionner ce robot. Pour l'assemblage, les essais et les réglages – qui vont vous prendre un bon moment – vous pouvez déjà commencer avec une alimentation de labo réglée à 7,5 V, même si, au final, le robot devra bien sûr fonctionner sans fil. À noter que les batteries 18650 que j'ai utilisées ne rentraient pas parfaitement dans le logement qui leur est réservé. La connexion initiale n'était pas bonne du fait d'une pression insuffisante du ressort. Pour résoudre cela, je les ai simplement insérées avec un peu plus de fermeté.
Construction
Avec le bon manuel, l'assemblage est évidemment bien plus facile. Les instructions sont très claires, bien illustrées et structurées sous la forme d’étapes logiques. Vous pouvez facilement vous arrêter à la fin d'une phase d'assemblage, poursuivre le lendemain ou plus tard encore, ce qui n'est pas superflu en considérant la quantité de travail à réaliser pour obtenir le résultat final. L'assemblage de ce kit ne se fera certainement pas en bricolant à la va-vite. Je vous conseille de prendre votre temps et de ne pas vous précipiter.Le tournevis fourni s'adapte bien à la visserie minuscule du robot. Vous pouvez le magnétiser, ce qui peut s’avérer commode dans certains cas. Il est également très pratique (pour ne pas dire essentiel) d'avoir à votre disposition de petites pinces à bec effilé ou des brucelles pour maintenir (surtout) les écrous en place pendant le montage :

Fort heureusement, SunFounder a pensé à fournir quelques vis et écrous supplémentaires. Ce ne sera donc pas la fin du monde si l'un de ces petits objets tombe ou vous échappe. Tous les éléments s'adaptent parfaitement, les pièces sont aux bonnes dimensions et dans des finitions très soignées. Seuls les connecteurs des servocommandes sont un petit peu trop proches les uns des autres, ce qui nécessite d'exercer une force plus importante pour les mettre en place. Rien d'insurmontable cependant.
L'assemblage étant fait, vous disposez d'un robot complet devant vous. Les instructions vous indiquent à ce moment-là que vous devez disposer les câbles reliés aux servocommandes grâce à la gaine spiralée fournie. C'est assez logique, car les pattes du robot ne doivent pas se prendre dans les câbles lorsqu'il se déplace. Pour autant, quelques explications supplémentaires pour installer le câblage de manière optimale auraient été bienvenues.

J'ai estimé que quatre morceaux d'un peu plus de 10 cm de longueur chacun me permettaient de fixer les trois câbles des cartes de servocommande sur chaque patte. Il m’est resté ensuite suffisamment de gaine spiralée pour la touche finale et j'ai trouvé le résultat satisfaisant. Prenez soin, lors des premiers essais de mouvement, de vérifier si le câblage n'est ni trop serré ni trop relâché et réglez les passages de câbles en conséquence.
Procédure d'étalonnage
Une fois tout cela effectué, il reste à étalonner le robot. Le logiciel permet de configurer les servocommandes et la position des segments de pattes pour que le quadrupède se déplace correctement. Même si cette procédure d'étalonnage est très clairement décrite, la pratique est un petit peu moins évidente. Vous avez à votre disposition un diagramme en papier et une règle pour mesurer la position des pattes, mais cela ne marche pas vraiment très bien. Il est assez difficile d'aligner le robot sur le papier pour effectuer les mesures, mais fort heureusement cette opération ne réclame pas une précision absolue et votre quadrupède sera très rapidement prêt à fonctionner.
À partir de là, vous pouvez laisser le quadrupède se promener en le maîtrisant grâce à la télécommande ou vous montrer ses talents de danseur grâce aux croquis Arduino contenus dans le fichier téléchargé. Vous pouvez également modifier le logiciel. Le manuel donne d’ailleurs quelques explications sur le lien entre le logiciel et le mouvement des pattes, même si nous entrons là dans un domaine un peu plus complexe.
Conclusion
Selon le fabricant, ce kit a été conçu pour l'enseignement afin de permettre à des enfants de découvrir la robotique et les logiciels Arduino. Sans doute serait-il dans ce cas très utile d'être accompagné par quelqu'un qui connaît bien ce kit. Néanmoins, tout un chacun devrait pouvoir faire fonctionner correctement ce robot. Je n’ai (presque) aucune réserve concernant le manuel et les pièces mécaniques ont été conçues et fabriquées avec soin. Les explications relatives à l'utilisation du logiciel Arduino sont également très claires, bien que, selon moi, le montage réclamera un effort supplémentaire pour les débutants dans ce domaine.Quoi que vous ayez l'intention de faire avec ce robot, sa construction est de toute façon une fête pour les bricoleurs (y compris les adultes !). Prévoyez donc quelques heures pour vous y plonger...
Discussion (2 commentaire(s))