
Banc d'essai : Walabot Creator, un capteur 3D hors du commun
17 septembre 2018
sur
sur
 Le Walabot est un capteur 3D qui utilise l’émission/réception d’ondes radio hautes fréquences pour créer une image de l’environnement en face de lui. Les murs ou autres obstacles ne l’arrêtent pas, et ce n’est pas tout ! Ses concepteurs l’ont aussi doté d’un moniteur de respiration et d’une fonction de poursuite.
Le Walabot est un capteur 3D qui utilise l’émission/réception d’ondes radio hautes fréquences pour créer une image de l’environnement en face de lui. Les murs ou autres obstacles ne l’arrêtent pas, et ce n’est pas tout ! Ses concepteurs l’ont aussi doté d’un moniteur de respiration et d’une fonction de poursuite.
Déballage et mise en service
 À l’ouverture du paquet, nous découvrons le Walabot Creator et des instructions de démarrage (Get Started) qui nous invitent à nous rendre sur la page https://walabot.com/gettingstarted, On y découvre des liens vers des didactitiels – dont celui de l’interface de programmation (Application Programming interface, API) de l’appareil – et une invite à télécharger le kit de développement logiciel (Software Development Kit, SDK), disponible pour Windows, Linux et le Raspberry Pi (un fichier .deb). Il y a bien une appli pour Android, Walabot DIY, mais elle ne fonctionne qu’avec l’appareil du même nom, et pas avec les Walabot Starter, Creator ou Developer.
À l’ouverture du paquet, nous découvrons le Walabot Creator et des instructions de démarrage (Get Started) qui nous invitent à nous rendre sur la page https://walabot.com/gettingstarted, On y découvre des liens vers des didactitiels – dont celui de l’interface de programmation (Application Programming interface, API) de l’appareil – et une invite à télécharger le kit de développement logiciel (Software Development Kit, SDK), disponible pour Windows, Linux et le Raspberry Pi (un fichier .deb). Il y a bien une appli pour Android, Walabot DIY, mais elle ne fonctionne qu’avec l’appareil du même nom, et pas avec les Walabot Starter, Creator ou Developer. Nous avons installé le SDK sur un PC sous Windows 7 Professional 64 bits. Le système nous a bien entendu demandé si le pilote de Walabot était d’une source fiable, nous avons répondu par l’affirmative. Nous avons aussi essayé avec un PC sous Windows 10, mais le Walabot n’a pas été reconnu lors du raccordement ; il existe désormais une version bêta du SDK pour Windows 10, qui fonctionne parfaitement.
Nous avons installé le SDK sur un PC sous Windows 7 Professional 64 bits. Le système nous a bien entendu demandé si le pilote de Walabot était d’une source fiable, nous avons répondu par l’affirmative. Nous avons aussi essayé avec un PC sous Windows 10, mais le Walabot n’a pas été reconnu lors du raccordement ; il existe désormais une version bêta du SDK pour Windows 10, qui fonctionne parfaitement.L’application peut être démarrée via le lien WalabotAPItutorial, qui a été créé dans le menu de démarrage lors du processus d’installation. Nous sommes dans un premier temps dirigé vers les quatre étapes du raccordement de l’appareil. On peut ensuite naviguer dans les diverses options du SDK via les onglets en haut de l’écran.

Que voit-on ?
 Le deuxième onglet du programme, Sensor ‒ Target Detection, est le plus intéressant ; c’est ici qu’on ajuste les paramètres et qu’on a un aperçu de ce que le capteur « voit ». Réglages possibles :
Le deuxième onglet du programme, Sensor ‒ Target Detection, est le plus intéressant ; c’est ici qu’on ajuste les paramètres et qu’on a un aperçu de ce que le capteur « voit ». Réglages possibles :- avec R on fixe le rayon d’action, de 1 cm à 1 m(*) ;
- avec Theta l’angle d’ouverture horizontal, de 0 à 90°(**) ;
- avec Phi la directivité verticale, de 0 à 90°(**) ;
- dans la colonne Resolution, on détermine la résolution de chacun des trois paramètres ci-dessus ;
- Threshold (seuil) permet de filtrer les signaux faibles ;
- si l'on active Moving Target Indicator (indicateur de cible mobile), le logiciel ne prendra en compte que les objets en mouvement ; les objets d’abord mobiles puis à l’arrêt seront progressivement rejetés ;
- le nombre potentiel d’objets en mouvements peut être fixé, de même que le nombre maximal d’objet à indiquer dans les champs de détection.
** Appareil vertical avec le connecteur USB vers le bas.
Il y a encore deux boutons, Apply & Calibrate (appliquer et étalonner) et Sensor Tutorial (didacticiel du capteur). Pour enregistrer une modification des paramètres, on appuie sur Apply & Calibrate, et l’étalonnage est exécuté. Lors de cette phase, il ne faut pas d’objets mobiles devant le capteur, ou les résultats du processus de mesure seraient faussés.
L’arène
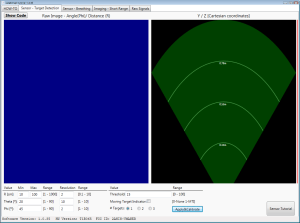
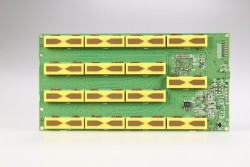
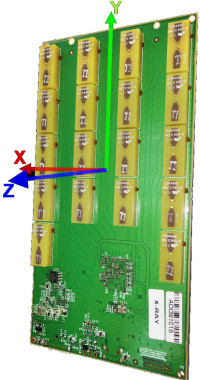 Le secteur scanné par le capteur s’appelle Arena (l’arène). Les deux fenêtres montrent une interprétation de ce qui est capté par les 15 antennes. Les rayons d’action suivant les axes y et z, où le capteur est le plus sensible, sont indiqués. Il est préférable de placer l’appareil à l’horizontale, le connecteur USB sur la droite lorsque l’on regarde le Walabot ; un mouvement d’objet par ex. vers la gauche sera ainsi reproduit correctement à l’écran.
Le secteur scanné par le capteur s’appelle Arena (l’arène). Les deux fenêtres montrent une interprétation de ce qui est capté par les 15 antennes. Les rayons d’action suivant les axes y et z, où le capteur est le plus sensible, sont indiqués. Il est préférable de placer l’appareil à l’horizontale, le connecteur USB sur la droite lorsque l’on regarde le Walabot ; un mouvement d’objet par ex. vers la gauche sera ainsi reproduit correctement à l’écran.La fenêtre de gauche montre l’intensité des signaux reçus (réflexions), le bleu clair pour les faibles intensités, le rouge pour les plus fortes. La position reproduite à l’écran est fidèle à la position dans l’arène.
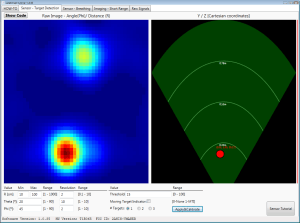 La fenêtre de droite est une visualisation du plan yz, xz si l’appareil est posé à l’horizontale comme suggéré ci-dessus. L’angle d’ouverture Phi limite le champ d’action du capteur et donne à l’arène la forme d’un secteur de cercle. Il est à noter que certaines combinaisons de Phi et Theta ne sont pas acceptées, et le logiciel renseignera une erreur. Dans le graphique montré ici, les objets détectés (au maximum trois) sont indiqués par un point rouge annoté de données numériques ; il s’agit d’une version filtrée de la fenêtre de gauche.
La fenêtre de droite est une visualisation du plan yz, xz si l’appareil est posé à l’horizontale comme suggéré ci-dessus. L’angle d’ouverture Phi limite le champ d’action du capteur et donne à l’arène la forme d’un secteur de cercle. Il est à noter que certaines combinaisons de Phi et Theta ne sont pas acceptées, et le logiciel renseignera une erreur. Dans le graphique montré ici, les objets détectés (au maximum trois) sont indiqués par un point rouge annoté de données numériques ; il s’agit d’une version filtrée de la fenêtre de gauche.

Lire l'article complet
Hide full article
Discussion (0 commentaire(s))