
Une solution poids-plume pour remplacer les accéléromètres
sur
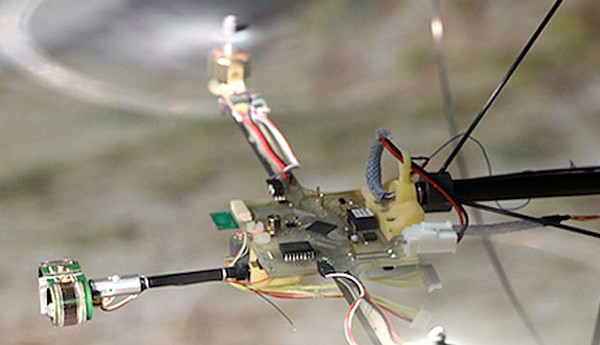
Tous les aéronefs sont équipés d’accéléromètres pour en mesurer toutes les accélérations. Cet outil essentiel n'a pas d'équivalent chez les insectes. C’est pourquoi le BeeRotor, un robot volant captif, a été conçu pour ajuster sa vitesse et suivre le relief du terrain sans accéléromètre, ni mesure de vitesse ou d'altitude.
Avec un poids de 80 g pour une longueur de 47 cm, il évite de façon autonome les obstacles verticaux dans un tunnel aux parois mobiles. Pour y parvenir, les chercheurs de l'Institut des Sciences du Mouvement utilisent le flux optique. Le principe peut être observé lors de la conduite sur autoroute : la vue en face est (assez) stable, mais si l’on tourne la tête côté, le paysage défile plus en plus vite, pour atteindre son maximum à un angle de 90° par rapport à la trajectoire du véhicule.
Pour mesurer le flux optique, BeeRotor est équipé de 24 photodiodes (pixels) réparties dans le haut et le bas de son œil. Comme chez les insectes, la vitesse à laquelle un élément du décor se déplace d'un pixel à l'autre fournit la vitesse angulaire du flux.
En guise de cerveau, BeeRotor dispose de trois boucles de rétroaction, qui agissent comme trois réflexes différents qui font directement utilisation du flux optique, affectant respectivement l'altitude, la vitesse et le champ de vision. BeeRotor peut donc éviter des obstacles abrupts.
BeeRotor ne manquera pas d’applications industrielles, par exemple pour de très petits robots ou de l'industrie spatiale, où chaque kilogramme envoyé dans l'espace a un coût considérable.
Discussion (0 commentaire(s))