
CARL ? Qu’est-ce que tu fais avec ma clé de douze ?
8 janvier 2019
sur
sur
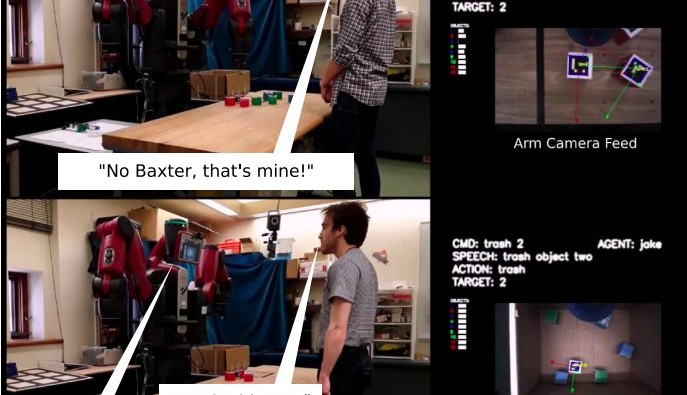
Une équipe de chercheurs de l'université Yale vient de mettre au point un modèle comportemental de système robotique incorporant des principes de propriété et des normes sociales pour faciliter les interactions dans les environnements sociaux humains.
Selon les futurologues, les robots devront nécessairement communiquer avec nous de manière efficace et appropriée dans des contextes sociaux. L'un des aspects essentiels d'une interaction humaine pertinente est la compréhension et l'adoption de comportements conformes à des « règles » mutuellement acceptées, nécessaires si nous souhaitons une société fonctionnant de manière optimale. À cet effet, le respect de la propriété d'un bien ou d'un objet facilite les interactions sociales dans lesquelles les autres sont pris en compte. Appliquer ces principes aux robots permettrait d'améliorer leurs interactions avec des humains pour leur permettre de différencier leurs outils et ceux d'autrui.
Selon l'approche mise au point par Brian Scassellati, Xuan Tan et Jake Brawer, il est possible de modéliser la propriété sous la forme d'un diagramme de relation probabiliste entre des objets et leurs possesseurs. Ce modèle est conjugué avec une base de données de normes fondées sur des prédicats, destinée à restreindre les actions d’un robot avec ses propres objets.
L'une des difficultés réside dans l'assimilation des méthodes garantissant la propriété. Certaines reposent sur des affirmations explicites (par exemple « Ne prends pas mes outils »), alors que d'autres sont apprises par l'expérience. Selon Brian Scassellati, l'association des deux approches d'apprentissage est simple pour les humains, mais beaucoup plus difficile pour les robots.
Le système mis au point par les chercheurs conjugue un nouvel algorithme progressif d’intégration de normes qui permet à la fois un apprentissage ponctuel et une assimilation à partir d'exemples. Le traitement s’appuie sur une dérivation bayésienne des relations de propriété en cas d'infractions manifestes aux règles et une prédiction des propriétaires probables d'un objet, basée sur la perception. En fonctionnant de concert, ces composants permettent au système d'assimiler les normes et les relations de propriété adaptées à différentes situations.
Selon les futurologues, les robots devront nécessairement communiquer avec nous de manière efficace et appropriée dans des contextes sociaux. L'un des aspects essentiels d'une interaction humaine pertinente est la compréhension et l'adoption de comportements conformes à des « règles » mutuellement acceptées, nécessaires si nous souhaitons une société fonctionnant de manière optimale. À cet effet, le respect de la propriété d'un bien ou d'un objet facilite les interactions sociales dans lesquelles les autres sont pris en compte. Appliquer ces principes aux robots permettrait d'améliorer leurs interactions avec des humains pour leur permettre de différencier leurs outils et ceux d'autrui.
Selon l'approche mise au point par Brian Scassellati, Xuan Tan et Jake Brawer, il est possible de modéliser la propriété sous la forme d'un diagramme de relation probabiliste entre des objets et leurs possesseurs. Ce modèle est conjugué avec une base de données de normes fondées sur des prédicats, destinée à restreindre les actions d’un robot avec ses propres objets.
L'une des difficultés réside dans l'assimilation des méthodes garantissant la propriété. Certaines reposent sur des affirmations explicites (par exemple « Ne prends pas mes outils »), alors que d'autres sont apprises par l'expérience. Selon Brian Scassellati, l'association des deux approches d'apprentissage est simple pour les humains, mais beaucoup plus difficile pour les robots.
Le système mis au point par les chercheurs conjugue un nouvel algorithme progressif d’intégration de normes qui permet à la fois un apprentissage ponctuel et une assimilation à partir d'exemples. Le traitement s’appuie sur une dérivation bayésienne des relations de propriété en cas d'infractions manifestes aux règles et une prédiction des propriétaires probables d'un objet, basée sur la perception. En fonctionnant de concert, ces composants permettent au système d'assimiler les normes et les relations de propriété adaptées à différentes situations.
Lire l'article complet
Hide full article
Discussion (0 commentaire(s))