
Le robot et son ange gardien volant
29 octobre 2015
sur
sur
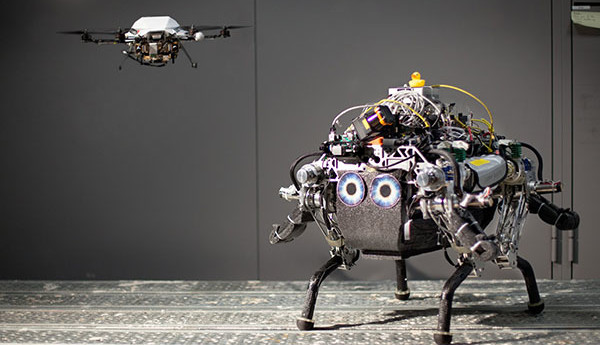
Les robots marcheurs se perfectionnent, mais les terrains accidentés font trébucher les plus agiles d’entre eux. Leur champ de vision limité ne leur permet pas d’anticiper, alors qu’un engin volant a une bien meilleure vision des environs. D’où l’idée (remarquable et fructueuse) d’associer les deux comme le font des chercheurs de l'École polytechnique fédérale de Zurich : un robot marcheur forme un binôme avec un hexacoptère qui reconnaît la zone autour du quadrupède et l’informe pour qu’il prenne la meilleure direction possible.
Le drone connaît la position du robot qu’il utilise comme référence pour dresser la carte du terrain. La caméra monoculaire qui équipe le drone permet la création d’une représentation spatiale en trois dimensions. Une fois que l’hexacoptère a rempli sa mission, il se pose et le robot commence à calculer son itinéraire. Il analyse la pente du terrain, les accidents, l'emplacement des obstacles et décide finalement du chemin qui le mènera à destination. Ainsi le robot arrive à destination en contournant des obstacles qu’en fait il n'a pas vus lui-même. Au cours de sa progression, le robot corrigera sa trajectoire s’il détecte un obstacle qui n'était pas encore là lors du passage du drone.
Le drone connaît la position du robot qu’il utilise comme référence pour dresser la carte du terrain. La caméra monoculaire qui équipe le drone permet la création d’une représentation spatiale en trois dimensions. Une fois que l’hexacoptère a rempli sa mission, il se pose et le robot commence à calculer son itinéraire. Il analyse la pente du terrain, les accidents, l'emplacement des obstacles et décide finalement du chemin qui le mènera à destination. Ainsi le robot arrive à destination en contournant des obstacles qu’en fait il n'a pas vus lui-même. Au cours de sa progression, le robot corrigera sa trajectoire s’il détecte un obstacle qui n'était pas encore là lors du passage du drone.
Lire l'article complet
Hide full article
Discussion (0 commentaire(s))