
Le shimmy du mille-pattes
25 juillet 2016
sur
sur
L’été est une saison propice à l’observation des insectes et autres bestioles ; on ne peut qu’admirer leur ténacité, leur ingéniosité, leur rapidité et leur précision. Prenez le mille-pattes qui file quand vous soulevez une pierre… Il est très rapide, oui, si rapide que vous n’avez peut-être jamais eu le temps de vous demander si sa vitesse était liée au nombre élevé de pattes.
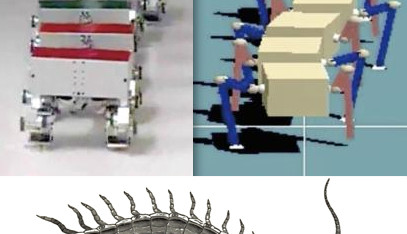
Le mouvement ondulatoire de son corps ne laisse personne indifférent. De là à comprendre comment il fonctionne, il reste des mystères à élucider. C’est ce à quoi s’attachent des chercheurs de l’université de Kyoto (Japon) avec des simulations puis des robots mille-pattes. Les chercheurs nippons ont eu la surprise de constater que le secret du mouvement des mille-pattes résidait dans la maîtrise de l’instabilité. Le mille-pattes se propulse en agitant dans un mouvement ondulatoire (connu aussi sous le nom de shimmy) ses nombreux membres qui produisent ainsi des forces d’accélération et de décélération. En fait, en raison de la proximité du sol, le mouvement de ces membres est gêné et leur marge de manœuvre réduite. Pour s’affranchir de cette restriction, l’animal fait onduler les segments de son corps dans un mouvement de propagation maîtrisée d’un état d’instabilité.
Le modèle mathématique de ce mécanisme biologique, où des ondulations naissent de l'instabilité, est appelé bifurcation supercritique de Hopf. Grâce à quoi les chercheurs ont pu reproduire la locomotion ondulatoire avec des robots myriapodes segmentés.
L’étude de la locomotion humaine et animale joue un rôle déterminant pour l’évolution de la robotique. Cette étude jette un éclairage nouveau sur des zones encore obscures de la motricité animale. Sa portée dépasse le cadre strict de la biologie, car une meilleure compréhension permettra de répondre à la question du nombre optimal de membres pour tel ou tel type de robot.
Le mouvement ondulatoire de son corps ne laisse personne indifférent. De là à comprendre comment il fonctionne, il reste des mystères à élucider. C’est ce à quoi s’attachent des chercheurs de l’université de Kyoto (Japon) avec des simulations puis des robots mille-pattes. Les chercheurs nippons ont eu la surprise de constater que le secret du mouvement des mille-pattes résidait dans la maîtrise de l’instabilité. Le mille-pattes se propulse en agitant dans un mouvement ondulatoire (connu aussi sous le nom de shimmy) ses nombreux membres qui produisent ainsi des forces d’accélération et de décélération. En fait, en raison de la proximité du sol, le mouvement de ces membres est gêné et leur marge de manœuvre réduite. Pour s’affranchir de cette restriction, l’animal fait onduler les segments de son corps dans un mouvement de propagation maîtrisée d’un état d’instabilité.
Le modèle mathématique de ce mécanisme biologique, où des ondulations naissent de l'instabilité, est appelé bifurcation supercritique de Hopf. Grâce à quoi les chercheurs ont pu reproduire la locomotion ondulatoire avec des robots myriapodes segmentés.
L’étude de la locomotion humaine et animale joue un rôle déterminant pour l’évolution de la robotique. Cette étude jette un éclairage nouveau sur des zones encore obscures de la motricité animale. Sa portée dépasse le cadre strict de la biologie, car une meilleure compréhension permettra de répondre à la question du nombre optimal de membres pour tel ou tel type de robot.
Lire l'article complet
Hide full article
Discussion (0 commentaire(s))