
Les voitures autonomes apprennent en imitant les conducteurs
12 août 2019
sur
sur
Des chercheurs du MIT étudient un procédé inédit pour permettre à des voitures de circuler sans chauffeur dans des zones inconnues d'elles. L'algorithme de commande de cette méthode imite la manière dont un chauffeur humain se repère pour aller d'un point A à un point B, à l’aide d’une simple carte produite par un appareil GPS. Cette forme de navigation et de localisation, dite variable de bout en bout, combine cartes élémentaires et caméras vidéo pour analyser les parages du véhicule pour lui permettre d'atteindre sa destination.
Vous et moi, pour circuler, n'avons besoin que d'une carte simple, comme celles que donne un appareil GPS. L'élimination des détails sans importance est facile et nous repérons tout aussi facilement les menaces et les obstacles rencontrés sur notre parcours.
La navigation de « bout en bout » intégrée à la conduite autonome. Vidéo : MIT/Amini
La nouvelle méthode du MIT analyse le comportement d'un conducteur humain, puis utilise les informations obtenues pour produire des algorithmes de commande beaucoup plus tolérants aux imprévus. Cette approche permet de répondre de manière appropriée à des situations inconnues en utilisant exclusivement les informations issues d'une carte simplifiée et de caméras vidéo pour définir l'itinéraire jusqu'à sa destination.
Espace mémoire optimisé
La commande classique de navigation d’un véhicule autonome fait appel à d'énormes volumes d'information pour définir son itinéraire entre les points de cheminement. Il faut donc des caméras et des capteurs embarqués pour établir une cartographie détaillée de l'environnement et maîtriser la trajectoire du véhicule. Avec un tel procédé, le volume d'informations nécessaire pour calculer des itinéraires autour d'une ville de la taille de San Francisco peut atteindre 4 To. En revanche, les humains se contentent de beaucoup moins. D’où l'intérêt de l’approche du MIT, fondée sur la modélisation des approches de navigation humaine, puisqu'il se contente d'à peine 40 Go de stockage pour les informations servant à circuler sur... la planète entière !Vous et moi, pour circuler, n'avons besoin que d'une carte simple, comme celles que donne un appareil GPS. L'élimination des détails sans importance est facile et nous repérons tout aussi facilement les menaces et les obstacles rencontrés sur notre parcours.
La nouvelle méthode du MIT analyse le comportement d'un conducteur humain, puis utilise les informations obtenues pour produire des algorithmes de commande beaucoup plus tolérants aux imprévus. Cette approche permet de répondre de manière appropriée à des situations inconnues en utilisant exclusivement les informations issues d'une carte simplifiée et de caméras vidéo pour définir l'itinéraire jusqu'à sa destination.
Apprendre en imitant les bons conducteurs
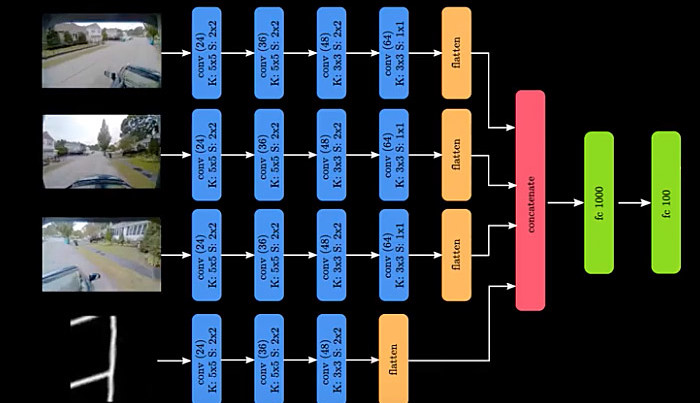
Daniela Rus, directrice du Computer Science and Artificial Intelligence Laboratory et son équipe exploitent les informations provenant d'un conducteur humain et appliquent des méthodes statistiques pour prédire les manœuvres de conduite appropriées. Ces prédictions sont basées sur un modèle d'apprentissage automatique, appelé réseau de neurones à convolution. Il apprend en traitant des images collectées lors d'une phase d'apprentissage au côté d'un conducteur humain. En cas de contradiction entre les informations provenant de la caméra et les données contenues dans la carte, c'est évidemment la sécurité qui est privilégiée.Lire l'article complet
Hide full article
Discussion (1 commentaire(s))