
Moteurs thermiques : Banc de rodage automatique
sur
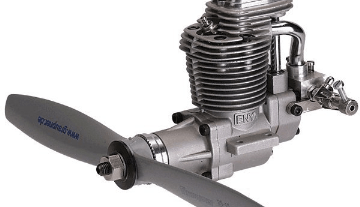
Les moteurs électriques brushless ont supplanté les moteurs thermiques dans les modèles d’avions radio-commandés. De nombreux modélistes restent cependant attachés aux moteurs thermiques. • Processeur 32 bits ARM7 cadencé à 59 MHz, mémoire flash de 128 Ko et mémoire RAM de 64 Ko • Contrôle des gaz par servo de modélisme standard • Chauffage de bougie piloté par microcontrôleur • Mesure de régime du moteur de 0 à plus de 30 000 t/min • Mesure de température du moteur de 0 à 160°C • Mesure de température ambiante • Réglage de la richesse du mélange géré par le logiciel embarqué • Terminal de poche mobile avec afficheur LCD alphanumérique de 4 lignes de 20 caractères, boutons poussoirs et bouton codeur • Liaison USB • Interface Direct Servo Control (DSC) • Bouton d’arrêt d’urgence • Alimentation entre 7 et 15 VCC
Le rodage d’un micromoteur thermique peut être réalisé à même le modèle réduit auquel le moteur est destiné, ou sur un banc de test. Le rodage consiste à faire fonctionner le moteur, chargé par une hélice, en lui faisant subir des cycles d’accélération et de ralentissement contrôlés. Ces alternances de hauts et bas régimes provoquent une usure contrôlée des pièces (piston et chemise). La façon dont sont réalisés ces cycles dépend des caractéristiques du moteur, des préconisations du constructeur et des habitudes de chacun.
Caractéristiques techniques du banc de rodage automatique d'Elektor
Course et sens de déplacement paramétrables
Il y a quelques petites corrections pour ce gros projet : - D10 devrait être une diode Zener de 3V3 au lieu de 5V6. - Dans le paragraphe Tester le terminal de poche (GMMI) le texte parle de JP8. Ceci est incorrect et devrait être JP6. - Plutôt une précision qu’une correction : pour ceux qui comptent acheter dans le commerce un câble tout fait pour relier le terminal de poche à la carte principale, vérifierbien qu’il est de « type 2 », c’est-à-dire, non croisé ! (Voir le dessin ci-contre.) Le câble fournit avec le kit est bon.
A ceux d'entre nos lecteurs qui se plaignent occasionellement trop petit nombre d'auteurs francophones dans Elektor, voici quelques mots sur Michel Kuenemann, l'auteur de cet article. Diplômé de l’Institut National des Sciences appliquées de Lyon (INSA), l’auteur est consultant indépendant en électronique depuis une vingtaine d’années. Il travaille actuellement sur le système d’alimentation électrique d’un gros avion de transport et pendant ses loisirs, il en construit des petits.
Nota bene 
Discussion (0 commentaire(s))