
Robot boiteux
11 juin 2015
sur
sur
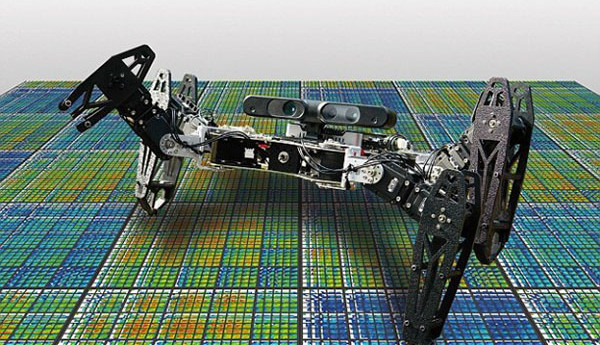
Les robots ne ressentent heureusement pas la douleur. Sinon, ce que fait cet hexapode serait impossible : réapprendre à marcher après avoir perdu un ou plusieurs membres.
Chez l’homme, quand elle est de cet ordre, la douleur inhibe généralement un fonctionnement immédiat. En revanche, beaucoup d’animaux à membres multiples continuent de se déplacer avec leurs membres restants. C’est le cas aussi de ce robot à six pattes dont « le cerveau » contient une cartographie de mouvements possibles. Quand l’un de ses membres est hors d’usage, le robot éclopé essaie de marcher en utilisant une autre configuration. Si elle échoue, il en essaie d'autres jusqu’à en trouver une qui lui permette d’avancer le plus droit possible. Puis il en teste une de plus, juste pour s’assurer qu’elle n’est pas meilleure. Les ajustements de mouvement sont rendus possibles par un nouvel algorithme de retour sur trace conçu par une équipe dirigée par Jean-Baptiste Mouret à l'Université Pierre et Marie Curie (UPMC).
Dans bien des domaines, l’utilité de robots capables de s’adapter à diverses avaries serait essentielle. Dans l'espace, par exemple, si l'atterrissage sur d'autres planètes ou sur des astéroïdes se passe mal, afin d’éviter une perte totale de ressources il est vital pour le robot de pouvoir s'adapter aux dommages qu'il subit. Les robots utilisés pour explorer les profondeurs de l'océan pourraient également bénéficier de cet algorithme.
Chez l’homme, quand elle est de cet ordre, la douleur inhibe généralement un fonctionnement immédiat. En revanche, beaucoup d’animaux à membres multiples continuent de se déplacer avec leurs membres restants. C’est le cas aussi de ce robot à six pattes dont « le cerveau » contient une cartographie de mouvements possibles. Quand l’un de ses membres est hors d’usage, le robot éclopé essaie de marcher en utilisant une autre configuration. Si elle échoue, il en essaie d'autres jusqu’à en trouver une qui lui permette d’avancer le plus droit possible. Puis il en teste une de plus, juste pour s’assurer qu’elle n’est pas meilleure. Les ajustements de mouvement sont rendus possibles par un nouvel algorithme de retour sur trace conçu par une équipe dirigée par Jean-Baptiste Mouret à l'Université Pierre et Marie Curie (UPMC).
Dans bien des domaines, l’utilité de robots capables de s’adapter à diverses avaries serait essentielle. Dans l'espace, par exemple, si l'atterrissage sur d'autres planètes ou sur des astéroïdes se passe mal, afin d’éviter une perte totale de ressources il est vital pour le robot de pouvoir s'adapter aux dommages qu'il subit. Les robots utilisés pour explorer les profondeurs de l'océan pourraient également bénéficier de cet algorithme.
Lire l'article complet
Hide full article
Discussion (0 commentaire(s))