
Aide à la conception interactive de robots articulés imprimés en 3D
2 mai 2016
sur
sur
La robotique part dans tous les sens, et le résultat est souvent inattendu. Les formes qu’elle prend en se développant sont infiniment variées, comme celles de la vie dont elle semble souvent s’inspirer. Un exemple surprenant de cette évolution est le logiciel d'assistance à la conception de robots imaginé à l’ETH de Zurich. Il est destiné à permettre à des profanes en matière de robotique de concevoir leurs propres créatures et leurs mouvements.
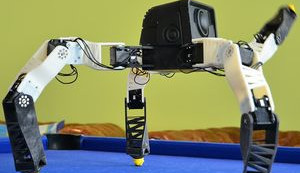
Ce travail préliminaire commence à l’écran. Puis l’utilisateur imprime en 3D les pièces du robot qu’il a imaginé. Viennent ensuite l’assemblage et l’incorporation des moteurs sur les articulations, de l’unité de commande sans oublier la batterie.
Ce logiciel imaginé par Victor Megaro, doctorant à l’ETH, permet à l’utilisateur novice de conformer la structure de son robot, en fixant à sa guise le nombre d’extrémités et de sections, librement combinables pour allonger ou raccourcir le robot.
Le défi consiste à trouver sur l’écran des com...
Ce travail préliminaire commence à l’écran. Puis l’utilisateur imprime en 3D les pièces du robot qu’il a imaginé. Viennent ensuite l’assemblage et l’incorporation des moteurs sur les articulations, de l’unité de commande sans oublier la batterie.
Ce logiciel imaginé par Victor Megaro, doctorant à l’ETH, permet à l’utilisateur novice de conformer la structure de son robot, en fixant à sa guise le nombre d’extrémités et de sections, librement combinables pour allonger ou raccourcir le robot.
Le défi consiste à trouver sur l’écran des com...


