
Banc d'essai : kit Sunfounder Smart Video Car pour Raspberry Pi
Amélioration de la timonerie de direction
Le test du véhicule commence par l'étalonnage des servos et là, j'ai eu un sérieux problème : la direction ne fonctionnait pas. Le servo faisait du bruit, mais rien ne se passait. J'ai cherché et trouvé que les deux entretoises de cuivre tout près des roues avant étaient en cause. Elles avaient une longueur strictement égale à la hauteur des pièces acryliques montées auparavant dans les roues avant. Et donc en serrant leurs écrous un peu trop, cela bloquait les roues. J'ai résolu ce problème en ajoutant une rondelle de 0,5 mm de chaque côté de chaque entretoise (quatre rondelles en tout). Après cette correction, les roues avant pouvaient s'orienter librement et la direction fonctionnait normalement.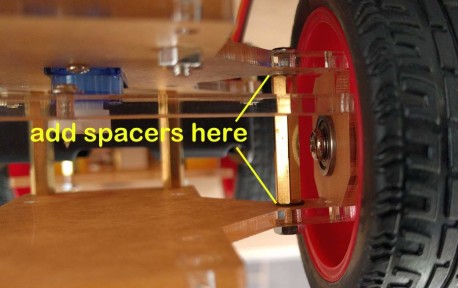
Une fois l'étalonnage effectué, ne pas oublier d'appuyer sur le bouton Confirm pour enregistrer les décalages dans le RPi.
C'est fini ! Alors comme le manuel le dit : en route ! Tout a fonctionné du premier coup, je n'ai donc rien à signaler.
Appli Android
Le code source d'une application expérimentale Android est inclus dans le référentiel GitHub ; il doit être compilé avec App Inventor. Une appli déjà compilée peut être téléchargée depuis la boutique de Google (Play Store rechercher Sunfounder). Pour pouvoir l'utiliser sur le RPi, il faut d'abord installer pip’ puis Django. Les instructions sont sur GitHub (elles font état de http_server, mais il s'agit de html_server). Malheureusement cette appli ne fonctionne pas avec mon téléphone (Nexus 5X avec Android 8.1.0).Conclusion
Le kit Sunfounder Smart Video Car pour Raspberry Pi est très bien fait. Les pièces sont bien usinées, le manuel est très bon et le logiciel fonctionne. Il y a eu bien sûr quelques problèmes mineurs, mais faciles à corriger. Le kit contient suffisamment d'écrous et de vis : vous pouvez en égarer un ou deux. Des guides spiralés et des colliers vous aideront à bien maintenir le câblage en place.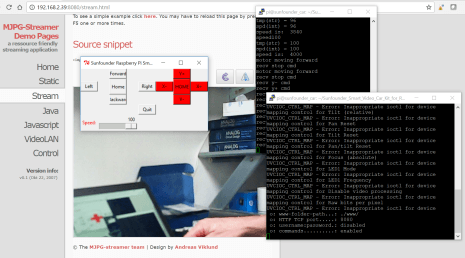
Si je devais en construire un autre, je le ferais dans cet ordre :
- installation du logiciel de télécommande sur le PC ;
- préparation du logiciel RPi et configuration du RPi ;
- test de la caméra ;
- test complet du circuit électrique avant de le monter sur le véhicule : on sait alors si tout fonctionne ;
- assemblage du véhicule (passer les câbles du servo sous le RPi en gardant assez de jeu pour les servos de la caméra) ;
- test du véhicule.
Consommation
Étant donné que l'utilisateur doit fournir les batteries li-ion, j'ai effectué quelques mesures de consommation.- Moteurs à pleine vitesse, caméra non installée : 600 mA @ 7 V.
- Moteurs à pleine vitesse, caméra installée : 700 mA @ 7 V.
- En attente avec caméra : 450 mA @ 7 V.
- RPi coupé : 100 mA @ 7 V (vous souhaiterez peut-être installer un interrupteur M/A).
Lire l'article complet
Hide full article
Discussion (4 commentaire(s))