
Carte spéciale IA: Apprentissage automatique avec le Jetson Nano
sur

L'intelligence artificielle sur les GPU n'est pas nécessairement synonyme de cartes graphiques coûteuses et de consommation d'énergie énorme. NVIDIA s'oriente depuis un certain temps vers des systèmes plus petits, notamment en raison de la concurrence des fabricants de microcontrôleurs. Dans cet article, nous examinons le Jetson Nano et une petite application de démonstration.
L'accélération de l'intelligence artificielle (IA) dans les systèmes embarqués est un marché en pleine évolution. Des entreprises telles que Canaan et Maxim Integrated se livrent une lutte acharnée pour la suprématie. ARM s'aventure également sur ce terrain avec l'annonce du Cortex M52. L'objectif est de proposer de petits systèmes IA qui exécutent des tâches d'IA de base en périphérie, sans connexion à Internet. L'architecture système est ainsi beaucoup plus stable car les tâches de ML ou d'IA peuvent être poursuivies même si la connexion au serveur principal est perdue. NVIDIA essaie de se positionner dans ce domaine depuis un certain temps avec la série Jetson.
Par souci de transparence, il convient de noter que les cartes personnalisées de ces systèmes ne sont pas vraiment réalisables pour les petites entreprises, ne serait-ce qu'en raison de l'extrême largeur de bande nécessaire pour accéder à la mémoire vive DDR. La société NVIDIA est consciente de ce problème. Son aperçu de portefeuille (disponible sur), qui donne aux électroniciens une vue d'ensemble de tout l'écosystème Jetson, comprend donc plusieurs " cartes de calcul ", telles que le Jetson TX2 présenté dans la figure 1.
Il convient également de noter qu'avec la prédominance de NVIDIA dans le secteur des GPU, l'écosystème tiers bien développé a également découvert la gamme de produits Jetson. Une vue d'ensemble de divers produits tiers est disponible à l'adresse, dont l'intégration dans une solution interne peut faire gagner beaucoup de temps de développement (pensez, par exemple, à la conception du boîtier et à la sélection des caméras, etc.).
Démarrage du système et fonctionnement
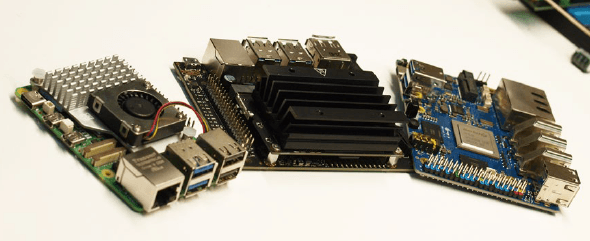
Pour les amateurs, NVIDIA propose le kit de développement NVIDIA Jetson Nano présenté dans la figure 2 (à côté d'un Raspberry Pi et d'un Orange Pi 5+). Au moment de la rédaction de cet article, le meilleur prix d'OEMSecrets (voir) était de 155 €. Bien que légèrement plus cher qu'un Raspberry Pi, la technologie NVIDIA est mieux adaptée à l'écosystème général de l'IA. Lors de l'achat du NVIDIA Jetson Nano, il est recommandé de commander également un bloc d'alimentation avec un connecteur d'alimentation aux dimensions habituelles de 5,5/2,1 mm. Dans les étapes suivantes, l'auteur utilise un MeanWell GST25E05-P1J.
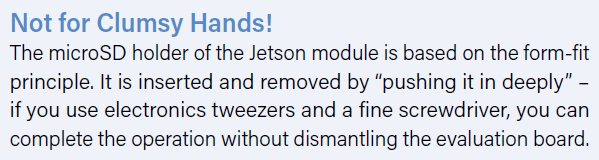
Un examen attentif du système (voir aussi la figure 3) montre qu'il s'agit d'un produit en deux parties. Outre la carte de support, qui contient les différentes interfaces, on trouve le module de calcul lui-même avec le dissipateur thermique. Il est nécessaire d'insérer une carte microSD contenant le système d'exploitation dans le module de calcul.
Le SoC intégré est un système multicœur doté de quatre cœurs Arm Cortex A57, en plus de l'accélérateur d'IA lui-même. Il en résulte une configuration qui rappelle les ordinateurs de traitement classiques fonctionnant généralement sous Linux embarqué. NVIDIA recommande d'utiliser une carte MicroSD d'une capacité d'au moins 32 Go et d'une vitesse minimale de UHS1. Le fichier image est disponible à l'adresse, vous pouvez l'extraire sur votre carte mémoire avec un lecteur de carte comme à l'accoutumée.
Vous aurez également besoin d'une souris et d'un clavier USB pour le démarrage initial; le Jetson prend en charge à la fois HDMI et DisplayPort pour la sortie écran. Nous supposerons qu'un câble Ethernet est également connecté dans les étapes suivantes.
L'absence de caméra s'est avérée problématique lors de l'installation. Au lieu d'un capteur CCD, NVIDIA utilise deux connecteurs ordinaires des Raspberry Pi 4 et cartes similaires. Il est possible de connecter certaines caméras Raspberry Pi directement au Jetson. Dans les étapes suivantes, l'auteur utilise une caméra Raspberry Pi 2 connectée au port CAM0 via un câble FPC conçu pour le Raspberry Pi. Il faut noter que la version du câble destinée au Raspberry Pi 5 n'est pas compatible avec le Jetson. Différents modèles 3D pour connecter la caméra sont disponibles chez ThingiVerse, et leur impression simplifiera la tâche aux développeurs.
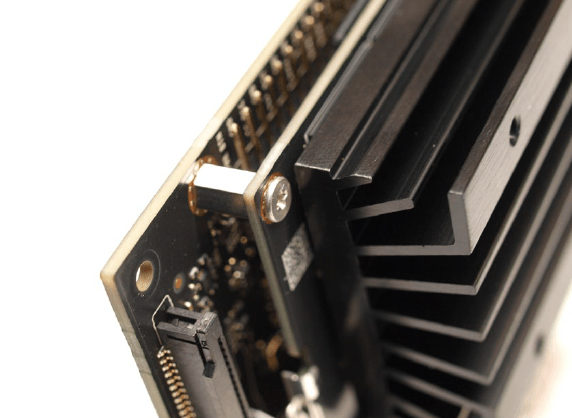
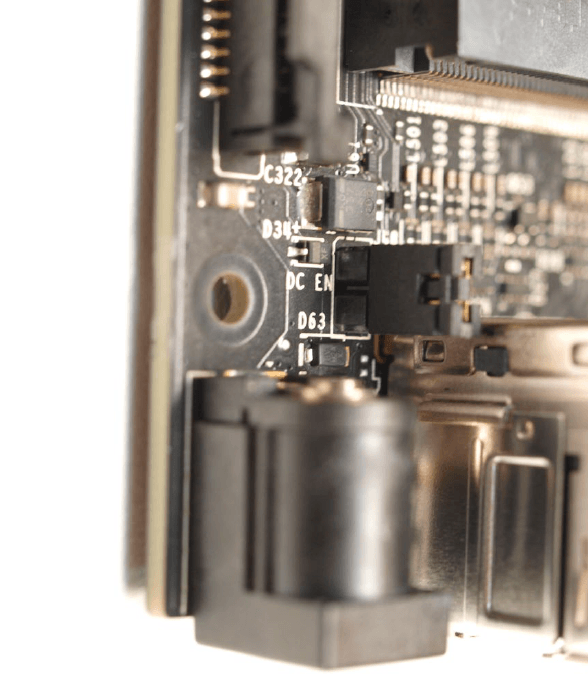
Si vous souhaitez alimenter le NVIDIA Jetson avec l'alimentation MeanWell susmentionné, vous devez éviter un petit piège de débutant. Le cavalier montré branché dans la figure 4 n'est pas branché à la livraison : dans ce cas, le connecteur DC n'est alors pas relié à l'alimentation. Lorsque l'alimentation est connectée, la LED d'état ne s'allume pas, ce qui peut prêter à confusion.
Lors du premier démarrage, l'ordinateur allume immédiatement l'écran HDMI - la reconfiguration de la carte microSD et d'autres initiations prennent un certain temps. Le système présente ensuite un bureau Ubuntu et vous demande de suivre l'assistant de bienvenue.
En général, il s'agit de l'assistant d'installation Ubuntu habituel, mais NVIDIA a ajouté une étape pour approuver les licences logicielles internes, entre autres choses. L'assistant de sélection du profil d'alimentation est important : il est recommandé de garder l'option par défaut. Elle garantit que le Jetson reçoit la puissance maximale.
Une fois cette étape terminée, il y en aura d'autres avant que la carte Jetson ne soit prête à l'emploi - des invites peuvent également apparaître sur le bureau pour redémarrer le système.
Premiers essais
NVIDIA s'appuie sur un système Ubuntu 18.04 plus ou moins compatible avec Jetson. L'auteur aime configurer de tels processeurs pour l'accès à distance afin d'épargner la peine de passer du clavier du PC à celui de l'ordinateur de traitement.
Cependant, l'application Settings d'Ubuntu n'est pas adaptée à cette tâche, c'est pourquoi nous exécutons sudo apt-get update et sudo apt-get upgrade pour mettre à jour l'inventaire de paquets lors de la première étape. Toute requête doit être validée en appuyant sur Enter ; vous devez autoriser le redémarrage du système Docker. Vous devez ensuite redémarrer le Jetson. En entrant sudo apt install vino, vous vous assurez que le serveur VNC est prêt à être utilisé.
Enfin, les commandes ci-dessous sont nécessaires pour que la configuration soit utilisable. Bien entendu, vous devez remplacer la chaîne de caractères thepassword par un mot de passe adapté.
tamhan@tamhan-desktop:~$ mkdir -p ~/.config/autostart
tamhan@tamhan-desktop:~$ cp /usr/share/applications/vino-server.desktop ~/.config/autostart
tamhan@tamhan-desktop:~$ gsettings set org.gnome.Vino prompt-enabled false
tamhan@tamhan-desktop:~$ gsettings set org.gnome.Vino require-encryption false
tamhan@tamhan-desktop:~$ gsettings set org.gnome.Vino authentication-methods "['vnc']"
tamhan@tamhan-desktop:~$ gsettings set org.gnome.Vino vnc-password $(echo -n 'thepassword'|base64)
Après le redémarrage suivant, il est possible d'accéder au Jetson à l'aide du client VNC Reminna si un utilisateur est connecté. Notez toutefois que l'applet d'accès à distance dans l'application Settings ne fonctionne toujours pas.
Ensuite, vous pouvez effectuer un test initial de la connexion de la caméra en entrant la commande suivante :
tamhan@tamhan-desktop:~$ gst-launch-1.0 nvarguscamerasrc ! nvoverlaysink
L'aperçu de la caméra qui peut être activé avec cette commande de base n'apparaît que sur un moniteur connecté à la carte Jetson - le système communiquant avec l'ordinateur via VNC voit plutôt la sortie du terminal. Pour mettre fin au processus, il suffit d'envoyer un événement d'interruption en appuyant sur Control + C.
L'accès à la caméra est alors - en général - assuré par des méthodes connues du PC ou de la station de travail. Le fichier , qui montre la configuration d'un pipeline basé sur Open CV, est particulièrement intéressant.
Les commandes suivantes sont nécessaires pour le rendre exécutable localement :
tamhan@tamhan-desktop:~$ git clone https://github.com/JetsonHacksNano/CSI-Camera
tamhan@tamhan-desktop:~$ cd CSI-Camera/
tamhan@tamhan-desktop:~/CSI-Camera$ python3 simple_camera.py
La fenêtre de la caméra ouverte est alors également visible via VNC, car les informations ne sont pas envoyées directement au framebuffer du GPU Tegra.
Si la fenêtre de la caméra est à l'envers, vous pouvez modifier le paramètre flip_method dans le fichier :
def show_camera():
window_title = "CSI Camera"
print(gstreamer_pipeline(flip_method=2))
video_capture = cv2.VideoCapture(gstreamer_
pipeline(flip_method=2), cv2.CAP_GSTREAMER)
if video_capture.isOpened():
. . .
Interagir avec les broches d'E/S (via Python)
Les systèmes d'IA nécessitent des compétences complètement différentes de la part du développeur, qui ne correspond généralement que très peu au développement classique des systèmes embarqués. Dans la pratique, les personnes extérieures au domaine, ayant une formation en informatique, maîtrisent souvent mieux l'IA que les développeurs de systèmes embarqués. La partenaire de l'auteur, qui programme très efficacement en Java, résout les tâches d'IA plus rapidement - mais elle n'a que peu de connaissances en langage assembleur.
Le but de ce bref aperçu de l'architecture logicielle est de souligner que nous décrivons intentionnellement l'accès aux GPIO sur le Jetson en Python dans les étapes suivantes. La raison en est que la plupart des développements de systèmes d'intelligence artificielle orientés vers l'utilisateur sont faites avec Python : si l'on s'appuie ici sur le langage C, on se retrouve avec une interface native.
La distribution standard de Python n'inclut pas la gestion de paquets sur le Jetson, c'est pourquoi vous devez entrer les commandes sudo apt install python-pip et sudo apt install python3-pip. L'étape suivante consiste à vérifier que les modules GPIO ont été correctement installés. Deux commandes sont également nécessaires ici, car les environnements Python ne sont (bien entendu) pas vraiment capables de partager leur référentiel de bibliothèques :
tamhan@tamhan-desktop:~$ sudo pip install Jetson.GPIO
tamhan@tamhan-desktop:~$ sudo pip3 install Jetson.GPIO
Nous ne pouvons pas présenter l'API GPIO Jetson dans son intégralité dans la limite de cet article. Sous , vous trouverez des exemples prêts à l'emploi qui expliquent l'API.
Le programme suivant est suffisant pour notre test :
import RPi.GPIO as GPIO
import time
output_pin = 18 # BCM pin 18, BOARD pin 12
def main():
GPIO.setmode(GPIO.BCM)
# BCM pin-numbering scheme from Raspberry Pi
GPIO.setup(output_pin, GPIO.OUT, initial=GPIO.HIGH)
print("Starting demo now! Press CTRL+C to exit")
try:
while True:
GPIO.output(output_pin, GPIO.HIGH)
GPIO.output(output_pin, GPIO.LOW)
GPIO.output(output_pin, GPIO.HIGH)
GPIO.output(output_pin, GPIO.LOW)
finally:
GPIO.cleanup()
if __name__ == '__main__':
main()
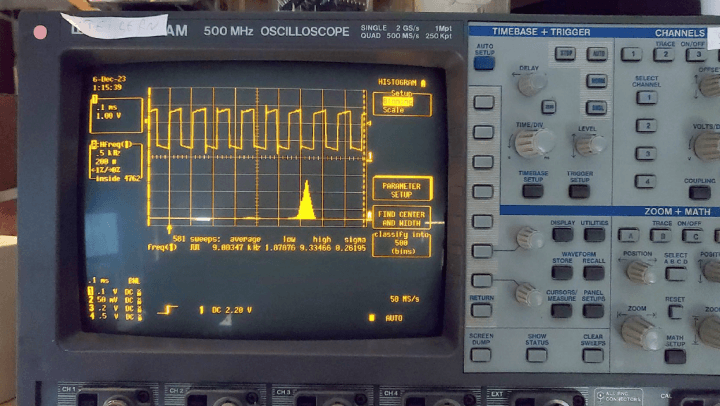
Ce qui est particulièrement intéressant ici, c'est que NVIDIA propose au développeur Jetson débutant plusieurs façons d'adresser les broches - nous utilisons ici la fonction GPIO.BCM, qui est basée sur le brochage du Raspberry Pi. La récompense de nos efforts est la capture d'écran présentée dans la figure 5 - la stabilité de la fréquence n'est peut-être pas élevée, mais elle est plus que suffisante pour exécuter des fonctions IdO.
Il convient également de noter que l'exécution d'exemples de programmation de GPIO sans droits de superutilisateur peut parfois poser des problèmes. Voir pour plus de détails à ce sujet.
Essais avec la fonction ML
En théorie, la disponibilité d'un système d'exploitation Linux complet et d'une interface USB3 (très rapide) facilite la réalisation de tests. Un exemple possible serait le modèle Stable Diffusion : en pratique, il est possible d'utiliser le Jetson comme générateur d'images à l'aide d'un runner (modifié).
Cependant, cette approche n'est pas recommandée dans la pratique : tant la mémoire graphique relativement faible de seulement 4 GB VRAM que le faible nombre de cœurs 128 (seulement) rendent la génération d'images lente. Sur Reddit, on trouve des rapports d'expérimentateurs de ML qui estiment jusqu'à 5 heures de calcul par image avec une taille de cluster de 512 × 512 pixels.
Il en va de même pour les solutions " de bout en bout " qui sont souvent présentées - l'entraînement d'un modèle nécessite tellement de puissance de calcul et de ressources que NVIDIA recommande de l'externaliser sur un ordinateur de bureau ou un ordinateur central dans la plupart des tutoriels - le Jetson est ensuite configuré avec les tailles des modèles prêt à l'emploi. Sur, vous trouverez des exemples plus ou moins prêts à l'emploi qui illustrent les performances du Jetson de manière simple.
Pour utiliser ce modèle " powershow ", vous devez télécharger et implémenter un logiciel NVIDIA. En théorie, l'utilisation d'un conteneur Docker est également possible ici _ pour ceux qui ne sont pas familiers avec la technologie des conteneurs, la compilation locale est une alternative, qui peut être réalisée en entrant les commandes suivantes :
sudo apt-get update
sudo apt-get install git cmake libpython3-dev python3-numpy
git clone --recursive --depth=1 https://github.com/dusty-nv/jetson-inference
cd jetson-inference
mkdir build
cd build
cmake ../
make -j$(nproc)
sudo make install
sudo ldconfig
N'hésitez pas à répondre (par oui ou non) à la question concernant l'installation des composants d'entrainement - l'auteur a répondu Non dans les étapes suivantes pour économiser de la mémoire sur sa carte microSD, dont la taille n'est que de 32 GB.
Une fois la compilation terminée avec succès, vous trouverez une structure de projet relativement complexe dans le répertoire ~/jetson-inference/build/aarch64$/bin, qui contient des fichiers Python ainsi que divers fichiers binaires. Il est intéressant de noter que NVIDIA y a même placé des exemples de test prêts à l'emploi.
Tout d'abord, nous voulons utiliser le classificateur - il analyse les fichiers d'images et détermine ce qu'il faut voir dans l'image fournie :
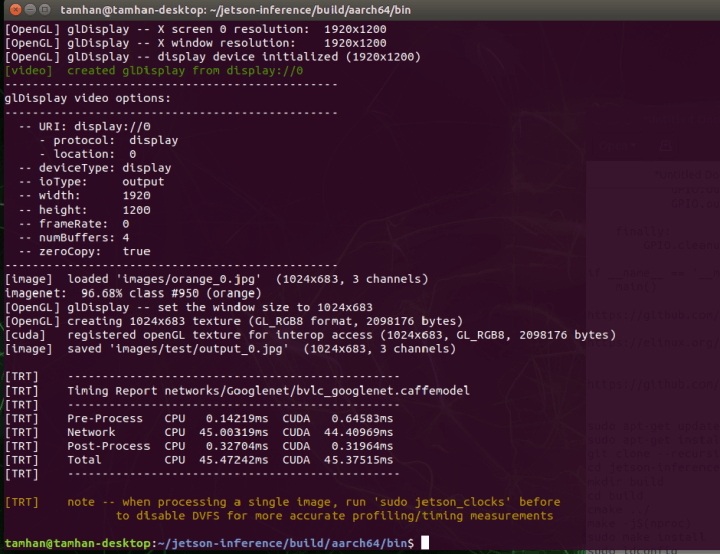
tamhan@tamhan-desktop:~/jetson-inference/build/aarch64/bin$ ./imagenet.py images/orange_0.jpg images/test/output_0.jpg
L'exécution de cette commande pour la première fois prend un peu plus de temps car les modules fournis sont optimisés pour les besoins du système Jetson. Ensuite nous voyons les infos de timing dans la figure 6.
Pour visualiser les résultats du processus de ML, visualisez le fichier image généré - la commande suivante ouvre le dossier de sortie directement dans le gestionnaire de fichiers Nautilus :
tamhan@tamhan-desktop:~/jetson-inference/build/aarch64/bin$ nautilus images/test/output_0.jpg
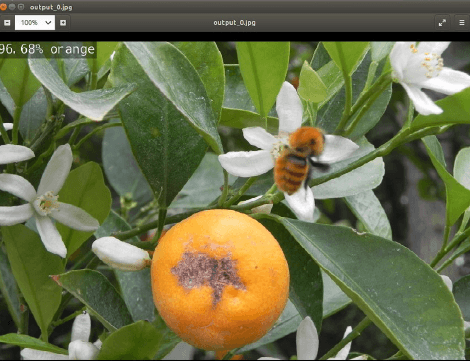
La récompense de vos efforts est l'image d'écran montrée dans la figure 7.
Analyse du fichier Python
Jetons maintenant un coup d'œil rapide à l'exemple de programme que nous venons d'utiliser. Le code source est accessible en entrant la ligne de commande suivante :
tamhan@tamhan-desktop:~/jetson-inference/build/aarch64/bin$ gedit imagenet.py
Même à première vue, il est clair que la bibliothèque utilisée ici est liée au classique ImageNet - NVIDIA regroupe plusieurs systèmes d'IA couramment utilisés avec le kit de démarrage Jetson.
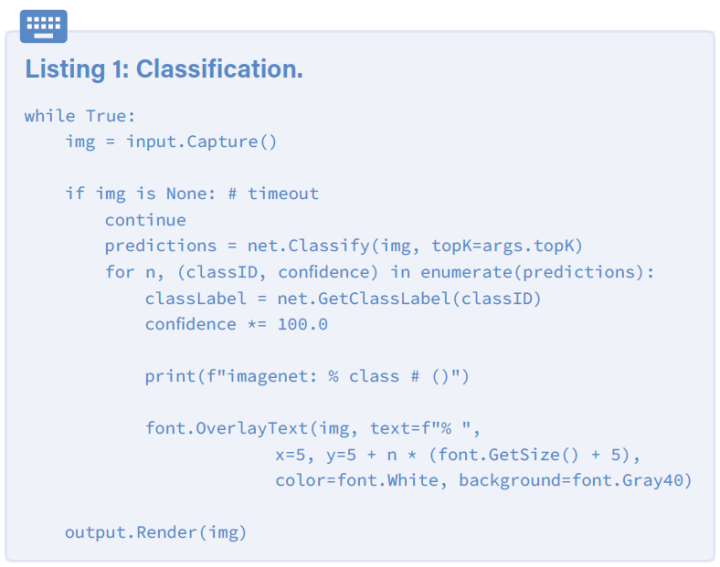
Le cœur de l'exemple de programme est une boucle infinie qui reçoit une image du flux d'entrée, la transmet au modèle de ML et affiche enfin les infos " calculées " (listage 1). Pour cela, l'initialisation des flux de données et du modèle à utiliser est effectuée comme suit :
net = imageNet(args.network, sys.argv)
input = videoSource(args.input, argv=sys.argv)
output = videoOutput(args.output, argv=sys.argv)
font = cudaFont()
Un autre aspect intéressant est d'obtenir ou de compléter le paramètre network, qui fournit le nom du modèle à traiter. Ici, NVIDIA s'appuie sur la classe ArgParser, qui est - normalement - spécialisée dans le traitement des paramètres fournis via la ligne de commande.
Dans le cas de cette déclaration, une valeur par défaut est introduite qui active et charge GoogLeNet :
parser.add_argument("--network", type=str, default="googlenet", help="pre-trained model to load (see below for options)")
Note : formation (guidée) en ligne avec une certification
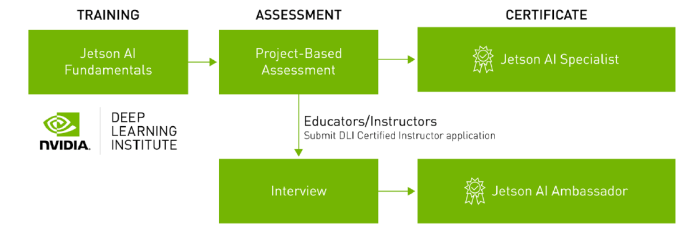
Le succès de l'ancienne Union soviétique dans plusieurs pays arabes et africains peut être en partie attribué au partenariat étroit en matière de formation - ce que le cadet apprend est ce qu'il utilise plus tard dans son travail. NVIDIA est clairement conscient de cette situation, c'est pourquoi la certification Jetson AI - comme le montre la figure 8 - consiste en un cours de ML entièrement gratuit en deux parties. Il convient également de souligner que Nvidia offre un certificat récompensant l'achèvement de ce cours.
Si vous êtes intéressé, nous vous encourageons à visiter le site . Vous y trouverez de plus amples informations sur la manière d'organiser au mieux votre participation à la formation NVIDIA.
Avantages de Linux
Avec le Jetson, NVIDIA lance un hybride dans cette lutte entre tous les acteurs du domaine de l'IA. D'une part, les microcontrôleurs basse consommation dédiés, tels que le Maxim MAX78000, consomment beaucoup moins d'énergie. D'autre part, ces contrôleurs ne prennent pas en charge CUDA : un modèle pouvant fonctionner sur un PC ou un ordinateur central doit donc être modifié avant de pouvoir être utilisé avec ces puces dans des applications IdO.
En revanche, le NVIDIA Jetson ne constitue pas un GPU à part entière : tant en termes de consommation d'énergie que des versions CUDA prises en charge (CUDA 11 ne fonctionne pas), le module n'est pas un substitut à part entière d'un RTX 4000.
En fin de compte, l'implémentation est réussie si modèle qui fonctionne sans problème sur un ordinateur ou une unité centrale doit être utilisé avec peu d'efforts et s'il dispose de suffisamment de ressources fournies par le Jetson. La disponibilité d'un système d'exploitation Linux signifie que relativement peu de travail de conversion est nécessaire pour un scientifique des données - se familiariser avec les API intégrées utilisées par Maxim et consorts demande beaucoup plus d'efforts. Le coût plus élevé du matériel peut donc être amorti rapidement et efficacement, en particulier pour les petites séries.
Cet article (230740-04) apparaît dans Elektor Mars/Avril 2024.
Questions ou commentaires ?
Avez-vous des questions ou des commentaires sur cet article ? Envoyez un courriel à l'auteur tamhan@tamoggemon.com, ou contactez Elektor redaction@elektor.fr.
Discussion (0 commentaire(s))